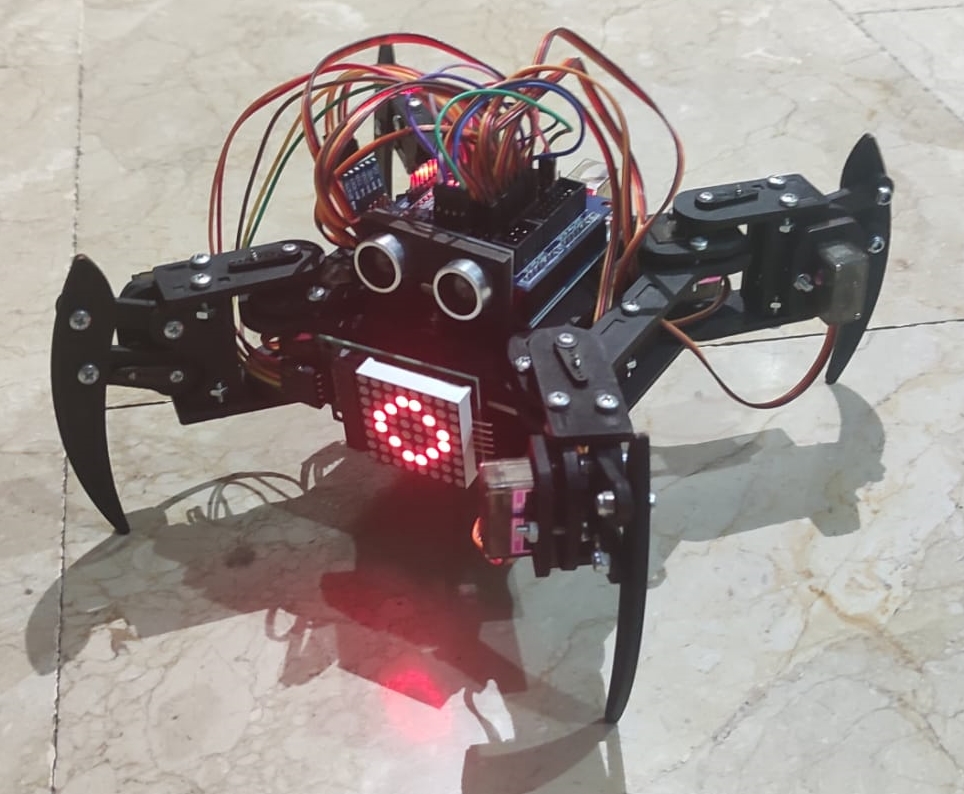
En esta entrada se explica el robot Xeskotron, un robot araña de cuatro patas, controlado por medio del microcontrolador Arduino UNO y una App Android.
Robot Xeskotron
Diseño
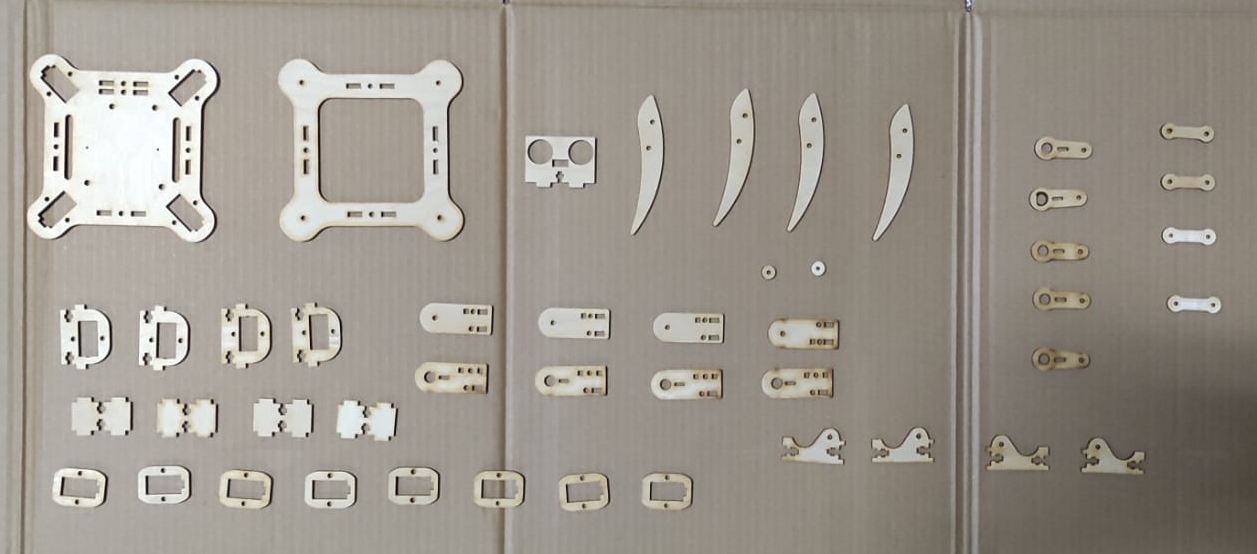
Xeskotron es un robot cuadrúpedo de aspecto parecido al de una araña, la estructura está basada en el robot “MEPED” con algunas variaciones. Las piezas del robot, diseñadas en AutoCAD, son de madera realizadas por corte laser, y posteriormente se han pintado con spray negro. Para la unión de las piezas se ha utilizado la tornillería correspondiente.

Componentes
- Estructura de madera por corte laser
- Arduino UNO R3 (compatible)
- Extensión Shield para Arduino UNO
- 8 servos MG90s
- Sensor de ultrasonidos HC-SR04.
- Módulo Bluetooth HC-05 HC-06
- Matriz LED 8×8 MAX7219
- Portapilas para 4 Pilas LR6 AA con Interruptor
- Cables dupont 20cm, H-H
Aplicaciones
Para controlar el robot se hará uso de un smartphone Android y la correspondiente aplicación. Gracias al módulo Bluetooth que el robot lleva incorporado, podrá recibir los comandos que se le envíen por control remoto. La aplicación ha sido desarrollada con la plataforma del MIT, App Inventor 2.
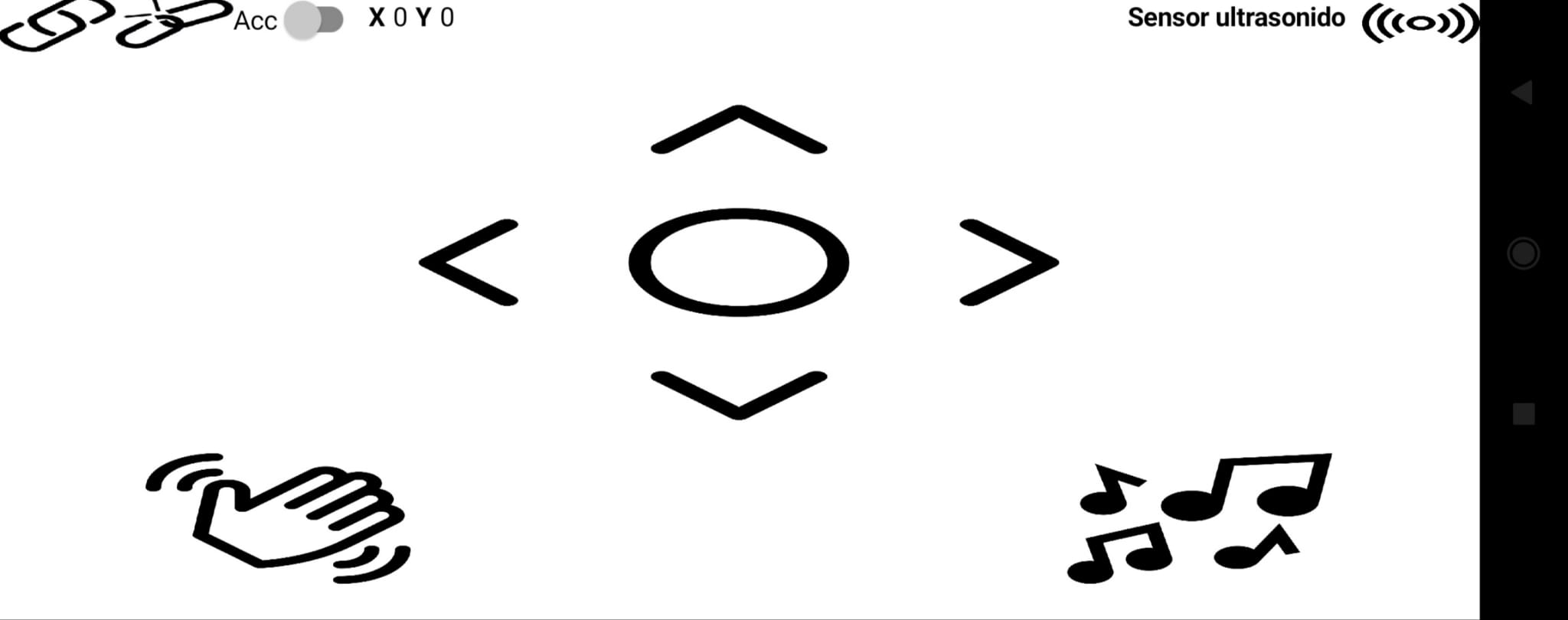
En la interfaz podemos ver diferentes botones e iconos con los que podemos controlar nuestro robot:
- Iconos de conexión y desconexión: mediante los iconos de la esquina superior izquierda realizamos la conexión y desconexión bluetooth
- Flechas y círculo: mediante las flechas podemos controlar el robot de forma manual y detener el movimiento mediante el círculo
- Switch «Acc»: al activar este switch podemos controlar el movimiento del robot haciendo uso del acelerómetro del móvil
- Mano: el robot se detendrá y realizará el movimiento de saludar con una de sus patas
- Notas musicales: el robot realizará un baile
- Sensor ultrasonidos: el robot hará uso del sensor HC-SR04 para detectar obstáculo y así evitarlos
Videos
Control movimientos
Sensor ultrasonidos