[:es]En esta entrada se muestra un nuevo diseño del robot DYOR para la asignatura de Robótica Móvil:
COMPONENTES
- Arduino nano.
- Shield Arduino Nano I/O.
- Pila 9V.
- Motor DC + Base + Ruedas + Rueda loca.
- Controlador del motor L298N.
- Sensor de ultrasonidos HC-S04.
- Zumbador KY-006.
- Módulo bluetooth SPP-C Bluetooth.
- 2 Siguelineas TCRT500.
- Cables de conexión de arduino (macho y hembra).
- LED RGB.
- Sensor de efecto Hall KY-003.
- Servomotor SG90.
FUNCIONAMIENTO DEL ROBOT
Selector de modos
El robot va a poder realizar una gran cantidad de cosas, por ello se ha pensado en implementar un selector de modos mediante una aplicación por bluetooth. Gracias a esto, el usuario podrá elegir si quiere el modo «sigue-carreteras», el modo de evitar obstáculos o controlarlo manualmente mediante la misma aplicación que permite la selección de los modos.
Modo evita obstáculos
Mediante el uso de un sensor sonar colocado en la parte delantera, el robot podrá detectar los obstáculos utilizando la mecánica del rebote de las ondas del ultrasonido. Dependiendo de la distancia, realizará 3 tipos de movimientos diferentes:
-
- Distancia > 50 cm: Únicamente avanzará.
- 25cm<Distancia<55cm: Realizará un giro progresivo de manera constante.
- Distancia<25cm: Se desplazará hacia atrás y realizará un giro brusco hacia la izquierda.
También se ha implementado en este modo la funcionalidad del LED RGB. Dependiendo de la distancia a la que esta detectando algo, el LED se encenderá de diferente color: verde, azul y rojo respecto a los rangos establecidos anteriormente.
Modo sigue-carreteras
Para llevar a cabo la realización de este modo se debe crear un circuito delimitado por dos líneas negras simulando un circuito (carretera) por el cual el robot circulará sin salirse. Es una versión ampliada del modo sigue-líneas, pero en este caso se han utilizado dos sensores TCRT500 colocados en los extremos del robot como se podrá ver en las imágenes incluidas posteriormente.
Se ha añadido la funcionalidad del buzzer, que realizará un sonido si se detecta línea por alguno de los dos lados, además de incluir de nuevo el LED RGB: verde (no detecta), azul (detecta por la izquierda) y rojo (detecta por la derecha).
Además, se ha implementado una funcionalidad extra utilizando el sensor Hall, que permite detectar la variación del campo magnético. Mediante el uso de pequeños imanes que se colocarán en el circuito, si el robot los detecta, realizará un pequeño turbo en el circuito (muy similar a los turbos vistos en el famoso juego de Mario Kart).
Modo manual
Mediante la aplicación diseñada en App Inventor, se ha podido realizar un control manual del robot mediante botones que enviarán un carácter por el canal serie y que, dependiendo del carácter, el robot realizará un movimiento diferente.
Adicionalmente, se ha incluido un pinza diseñada en Tinkercad cuya apertura y cierre se podrá controlar mediante un botón desde la aplicación.
DISEÑO Y CONSTRUCCIÓN DEL ROBOT
Para el diseño del robot, primeramente se hizo una simulación de este en el programa Tinkercad. Aunque no es exactamente la versión final, la forma y componentes principales del robot aparecen representados:
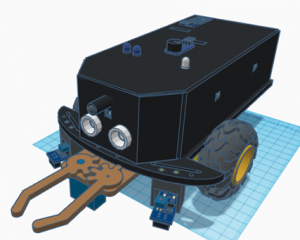
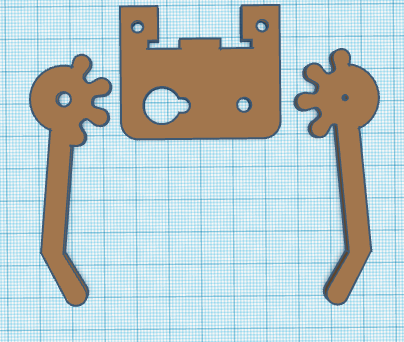
Para la base, se escogió directamente una base de plástico junto con un pack de ruedas y motores. Por otra parte, se han diseñado diferentes soportes para los sensores escogidos y se ha usado un diseño hecho para la la pinza:
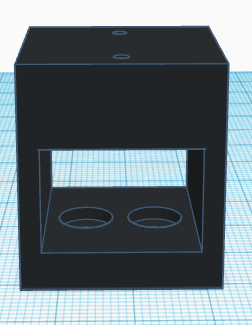
- Soporte siguelineas:
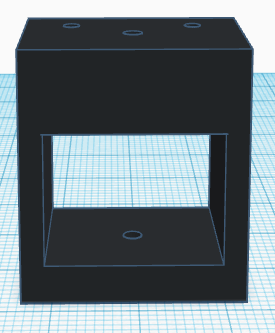
- Soporte sensor Hall:
- Pinza:
Todos los elementos han sido atornillados (excepto el módulo Bluetooth y el LED RGB) mediante agujeros propios de la base o agujeros realizados intencionadamente para fijar algunos elementos. Además, se han incorporado separadores de placa para elevar los componentes atornillados y evitar que las soldaduras de la electrónica estén en contacto directo con la base. Los componentes que se encuentran dentro de la propia carcasa del robot son: el Arduino nano (con la shield), el controlador de los motores DC y la pila de 9V. Tanto la batería como el Arduino se encuentran en la base, en cambio el controlador ha sido atornillado a la parte de arriba del robot.
En el exterior del robot se encuentran tanto los sensores TCRT500 como el sensor Hall atornillados a sus respectivos soportes. También se puede observar el sonar, incorporado a la parte delantera de la carcasa; la pinza y el servo que consiguen el mecanismo de apertura; y elementos como el bluetooth, el zumbador o el LED. El robot consta de un interruptor en la parte superior que permite cortar la alimentación de la pila si fuera necesario.
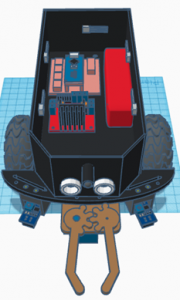
Finalmente, se puede observar el robot desde todos los puntos en las siguientes imágenes:



También se puede visualizar la parte de abajo, donde se visualiza el sensor de efecto Hall y por dentro, donde se pueden ver los separadores de placa además de la disposición de los elementos:


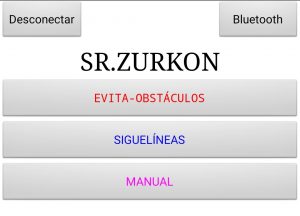
DISEÑO DE LA APLICACIÓN DEL MOVIL
Por otra parte, se ha diseñado mediante AppInventor la aplicación para controlar el robot en el modo manual. La aplicación permite la selección de los 3 modos principales del robot y, en el caso en que se pulse el botón del control manual, aparecerán los diferentes botones para controlar tanto el movimiento del robot como la pinza. En las imágenes siguientes se muestra la disposición de los botones:

VIDEOS
- Evita obstáculos:
- Sigue-carreteras
- Modo manual:
DESCARGAS
AUTOR
David Pérez Martínez[:]