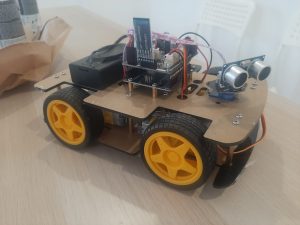
[:es]AstroMoon es un robot de 4 ruedas con diseño basado en el CyberTruck de Tesla. Capaz de seguir líneas, evitar obstáculos, moverse mediante un mando de infrarrojos, encender LEDs y emitir pitidos.

El robot ha sido construido con componentes electrónicos fijados a dos bases de madera y el diseño exterior con piezas de madera cortadas con láser y pintadas. Para conseguir funcionalidades se ha programado en Arduino el código correspondiente.

Componentes
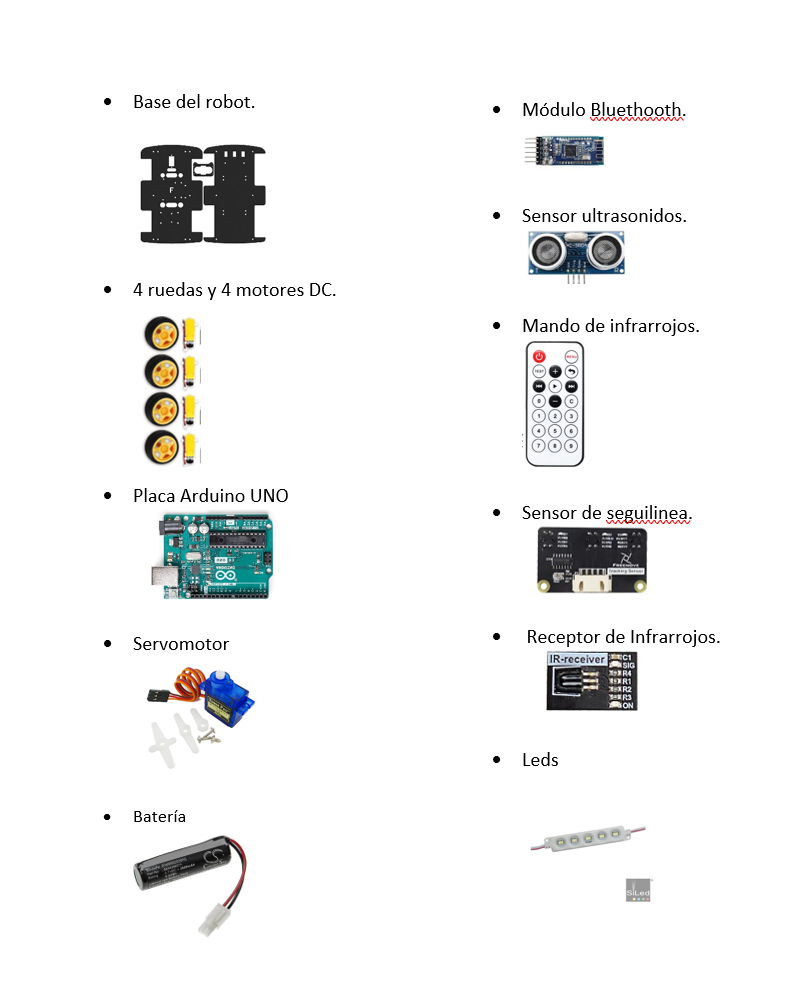
Ensamblaje componentes
Utilizando cables, tornillos y adhesivo se montan los componentes de la manera adecuada.
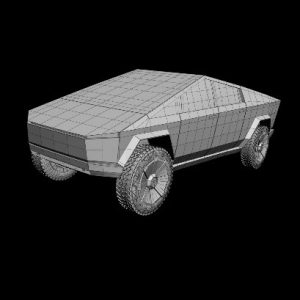
Diseño
Para fabricar el chasis se dibuja en AutoCad el diseño 2D de las piezas necesarias a medida, basadas en la maqueta del Tesla CyberTruck. Tras ello se pintan y se decoran y se pegan en la base del robot.




Funcionalidades
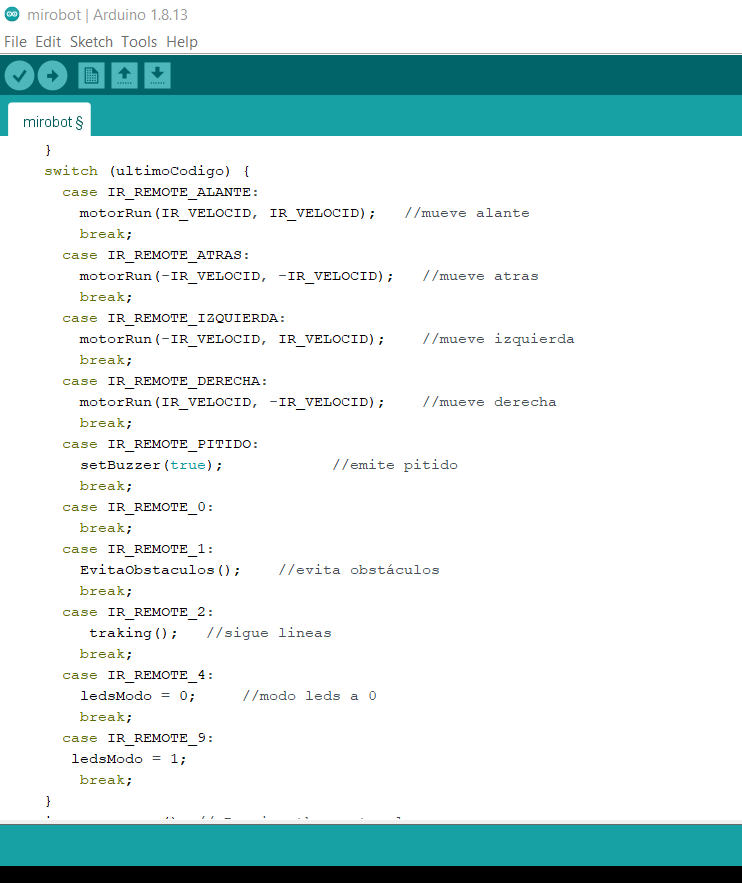
Para hacer que el robot funcione se ha programado en Arduino un programa que permite, según la tecla pulsada del mando de infrarrojos que el coche haga una cosa u otra, para ello se lee el código que se recibe mediante el receptor de infrarrojos y utilizando un «switch case» en Arduino se consiguen las distintas funcionalidades, llamando a cada función en su caso (sigue-líneas, evita-obstáculos, cambio luz LED, pitido…).
Control remoto por infrarrojos
Los botones arriba, abajo, derecha, izquierda del mando de infrarrojos hacen moverse al robot en la dirección indicada. Cada botón envía un código hexadecimal distinto, por lo que se programa una acción distinta por cada código.
Sigue-líneas
Si se pulsa el botón 2 del mando de infrarrojos el robot pasa al estado de sigue-líneas ya que el «case 2» del programa Arduino llama a la función diseñada para seguir líneas. El sensor detecta la línea negra del suelo y la sigue.
Evita-Obstáculos
Si se pulsa el botón 1 del mando de infrarrojos el robot pasa al estado de evita-obstáculos ya que el «case 1» del programa Arduino llama a la función diseñada para evitar obstáculos. El servomotor hace girar el sensor de ultrasonidos para detectar las paredes u obstáculos en varias direcciones. En el código se pueden modificar a demás las distancias de detección y cuando girar.
Luces LED
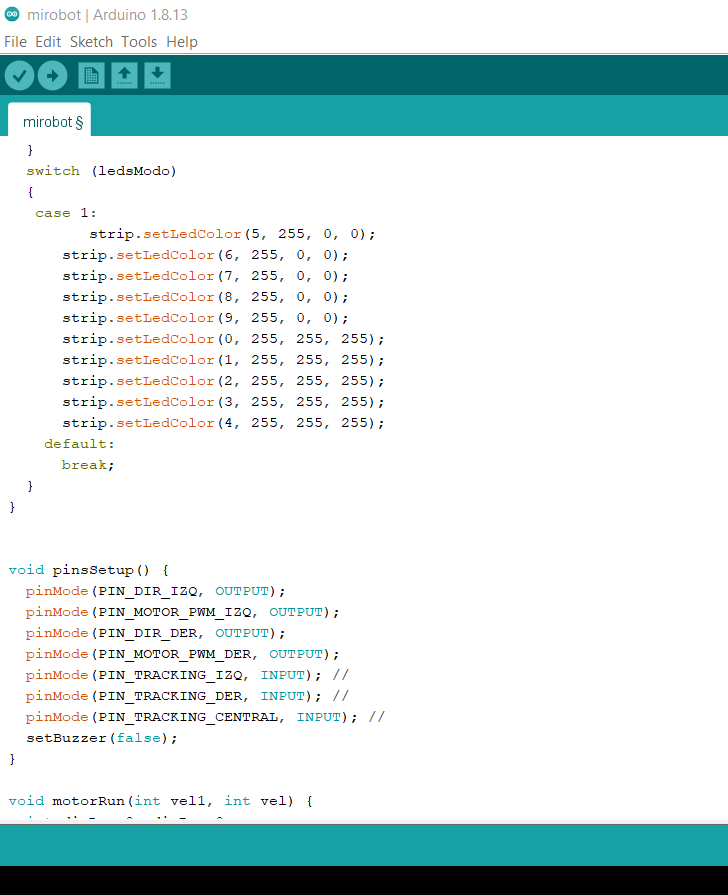
El botón 9 del mando enciende las luces LED del robot, blancas en la parte delantera y rojas en la trasera, simulando las luces de un coche. Para ello en el código Arduino se utilizan funciones que establecen X pin al un color RGB indicado, en este caso para el color Blanco (R=255, G=255, B=255) y Rojo (R=255, G=0, B=0).
El botón 4 del mando incrementa los colores RGB en +5 hasta llegar a 255 y vuelve a empezar, consiguiendo los LEDs cambien de color automáticamente.
Pitido
Al pulsar el botón central del mando el coche emite un pitido a través de un buzzer.
Parte del código
 [:]
[:]