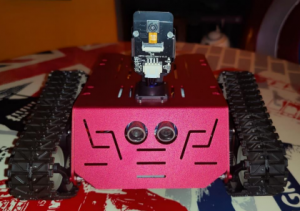
[:es]Kit de robótica con aspecto de tanque con ruedas del tipo oruga.
Introducción:
En este caso, se ha decidido por rapidez de envío y buscando un acabado final excelente, comprar un kit con todas las piezas necesarias para montar un «Tanque» mediante Arduino y una vez montado programarlo.
Componentes:
Aquí a continuación se especifican la lista de componentes a la vez que una foto de todos ellos:
- 4 Piezas de la carcasa de aluminio
- 2 Motores DC
- 1 Módulo Bluetooth CC2541
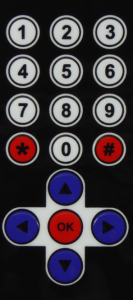
- 1 Mando de control remoto
- 2 Servos SG90
- 1 Batería 7.4 V
- 1 Kit de herramientas
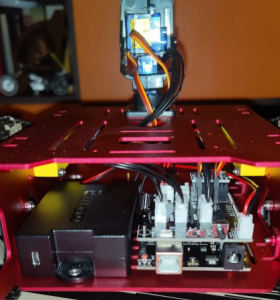
- 1 Placa Arduino Uno
- 1 Placa de expansión
- 1 Módulo de cámara (que no va a ser utilizado)
- 1 Módulo GY-521
- 1 Módulo de seguimiento de líneas
- 1 Módulo de ultrasonidos
- 2 Ruedas conductoras
- 8 Ruedas conducidas
- 8 Protectores de ruedas
- 8 Packs de tornillería
- 2 Cintas para las ruedas

Fotos Varias:


 Aplicaciones:
Aplicaciones:
Sigue líneas:
Para esta función se ha usado un sensor sigue líneas triple, es decir, con sensor central, derecho e izquierdo, gracias al cual se puede lograr una mejor aplicación. El funcionamiento es simple, si los tres sensores detectan blanco, el robot empieza a girar por si encuentra negro, si al cabo de un tiempo no lo hace, se queda parado esperando que se le recoloque. En el caso de encontrar la línea, irá rectificando su trayectoria para seguirla (si detecta medio negro solo o medio o cualquiera de los lados irá recto, pero en el caso de que solo detecte un lado avanzará pero girando al lado contrario para centrarse en la línea)
Vídeo demostrativo:
Evita obstáculos:
Para esta función se ha utilizado un sensor ultrasonidos, el robot va avanzando y detectando todo el rato si hay algún objeto enfrente (a una distancia de 20 cm), en el caso de detectarlo, gira primero a la derecha para comprobar si sigue detectando el objeto, en caso afirmativo hace un giro más amplio a la izquierda y vuelve a comprobar, entonces si no detecta nada avanza en línea recta. En el supuesto de no parar de encontrar objetos, el robot retrocede en línea recta y da un giro de 180º para intentar evitar de objetos y vuelve a funcionar igual que antes.
Vídeo demostrativo:
Sigue obstáculos:
Para esta función se ha vuelto a utilizar el sensor de ultrasonidos, el robot empieza a girar para encontrar algo que seguir, si no lo encuentra tras varios giros en diferentes direcciones, se queda quieto a la espera de que algo se cruce en su camino. EN caso de encontrarlo empieza a avanzar recto, cuando lo deja de detectar gira primero a la derecha para intentar encontrarlo y si no lo hace a la izquierda y empieza a girar como antes hasta que lo encuentre. Cada vez que encuentra algo va en línea recta hacia ello.
Vídeo demostrativo:
Control remoto:
Para esta función simplemente se han asignado botones en el control remoto y en la aplicación para decir que avance, retroceda, gire a la derecha, gire a la izquierda o se pare.
Vídeo demostrativo:
Control:
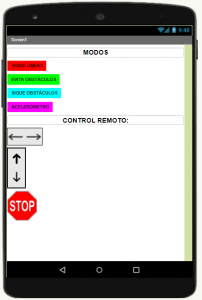
Para controlar el robot se utilizarán un mando de control remoto y una aplicación que se usará en el móvil mediante Bluetooth, aunque se prefiere el uso del mando ya que es más fiable:
- Modo Sigue Líneas
- Modo Evita Obstáculos
- Modo Sigue Obstáculos
- Flecha Arriba = Avanza
- Flecha Derecha = Gira a la derecha
- Flecha Izquierda = Gira a la izquierda
- Flecha Abajo = Retrocede
- OK = Stop
Y la interfaz de la app usada es esta:
 [:]
[:]