[:es]Esta entrada mostrará el diseño, ensamblaje y aplicaciones correspondientes a un robot cangrejo basándonos en diseños establecidos por DYOR, así como una breve explicación de la app utilizada para su control creada con Thunkable.
DYOR Cangrejo
Esta entrada mostrará el diseño, ensamblaje y aplicaciones correspondientes a un robot cangrejo basándonos en diseños establecidos por DYOR, así como una breve explicación de la app utilizada para su control creada con Thunkable.

Figura 1. Montaje final del robot
Diseño
Basándonos en un diseño cualquiera que podemos encontrar en la página web de Robótica Fácil en la parte de DYOR, se ha realizado un diseño en AutoCAD para representar en dos dimensiones las piezas que necesitamos para su montaje. Estas piezas serán de 3mm de madera y serán cortadas por una cortadora láser. La siguiente imagen del diseño presenta en color rojo la trayectoria por la que pasará la cortadora (corte láser) y en verde el marcado superficial de la pieza.
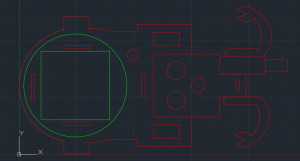
Figura 2. Diseño de las piezas
Ensamblaje
Hay que tener en cuenta que antes de proceder a cortar las piezas es recomendable comprobar que el diseño realizado en AutoCAD puede ser viable y no nos encontraremos con problemas de ensamblaje a la hora de montar el robot. Para evitar esto se ha realizado un ensamblaje de las piezas en 3D con el programa SolidWorks.
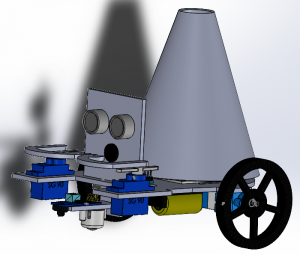
Figura 3. Ensamblaje 3D con SolidWorks
Componentes
- Arduino Nano
- I/O Extension Shield para Arduino Nano
- Cable mini-USB
- 2 Micro Servo SG90
- 2 Micro Servo FS90R
- 2 rueda FS90R
- Sensor de ultrasonidos HC-SR04
- Zumbador KY-006
- Módulo Bluetooth HM10
- Powerbank 3600mAh USB
- Módulo sigue líneas TCRT500
- Rueda loca (esfera)
- Cables Hembra-Hembra de 20 cm
Aplicaciones
Las aplicaciones para las que está diseñado este robot cangrejo son, sigue líneas , evitar obstáculos y control remoto por bluetooth mediante una app móvil.
Sigue líneas
En esta aplicación el robot es capaz de seguir una línea negra establecida como un camino que debe recorrer gracias al sensor TCRT500. Si el robot detecta que no está en la línea negra, éste corrige su trayectoria para centrarse de nuevo en la línea negra y seguir su camino.
Evasión de obstáculos
En este caso el robot abre y cierra las pinzas mientras se mueve. En caso de encontrarse un obstáculo detectado por el sensor de ultrasonidos, se pararía y cambiaría de dirección (girar 90º) para poder evitarlo.
Aplicación móvil
La aplicación móvil para el control del robot se ha hecho mediante la página web de Thunkable, pues permite el desarrollo y diseño de apps para fines como este. El primer paso es realizar una interfaz gráfica para que el usuario disponga de un menú y le sea sencillo entender la app, así como los distintos modos de funcionamiento del robot.

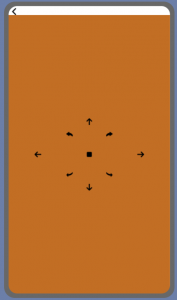
Figura 4. Aplicaciones del robot Figura 5. Aplicación control remoto
Creada la interfaz gráfica se procede a la programación por bloques que permita la comunicación entre la app y el módulo bluetooth que dispone el robot, ya que se basa en la transmisión de caracteres para la ejecución de los diferentes modos de funcionamiento.
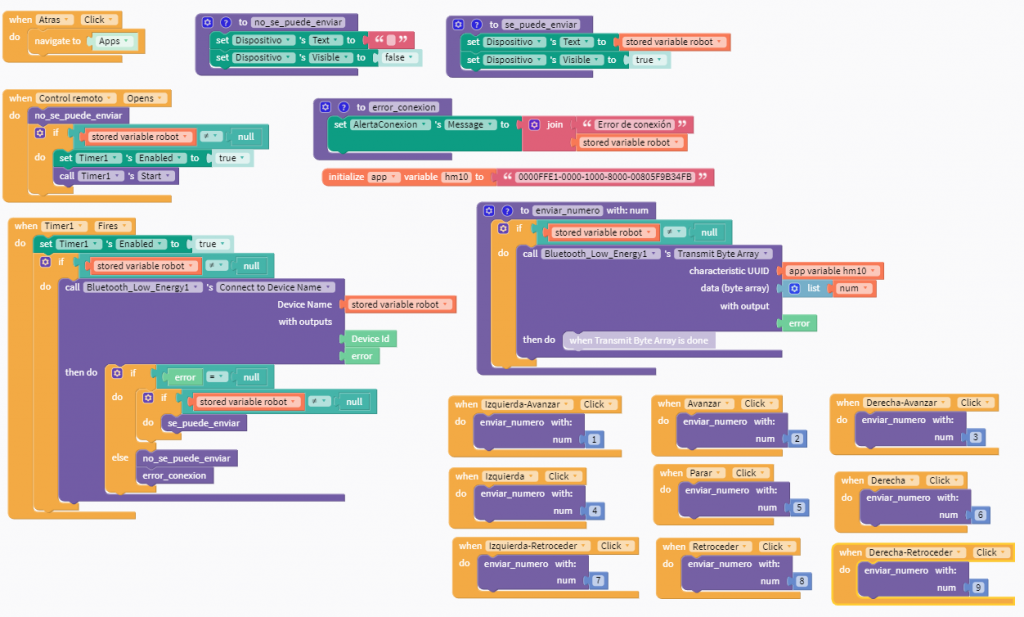
Figura 6. Programación por bloques (control remoto)
[:]