[:es]
RR-01 es un Robot de Reconocimiento cuadrúpedo diseñado para ser impreso en 3D, capaz de deambular de forma independiente sin chocar con obstáculos al mismo tiempo que evita caerse del borde de la mesa o por las escaleras. También puede ser controlado manualmente mediante una aplicación para dispositivos móviles. Ernest Folgado Brisa
RR-01
Descripción del proyecto
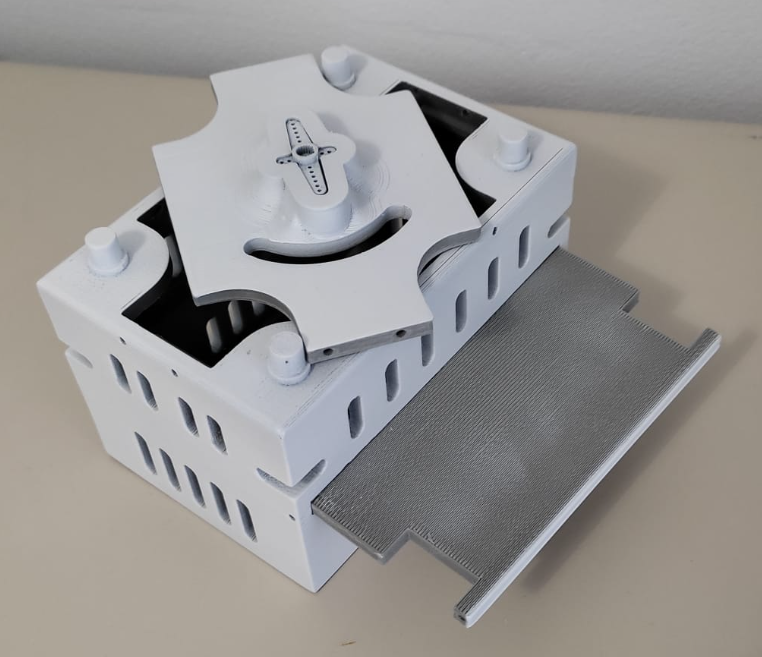
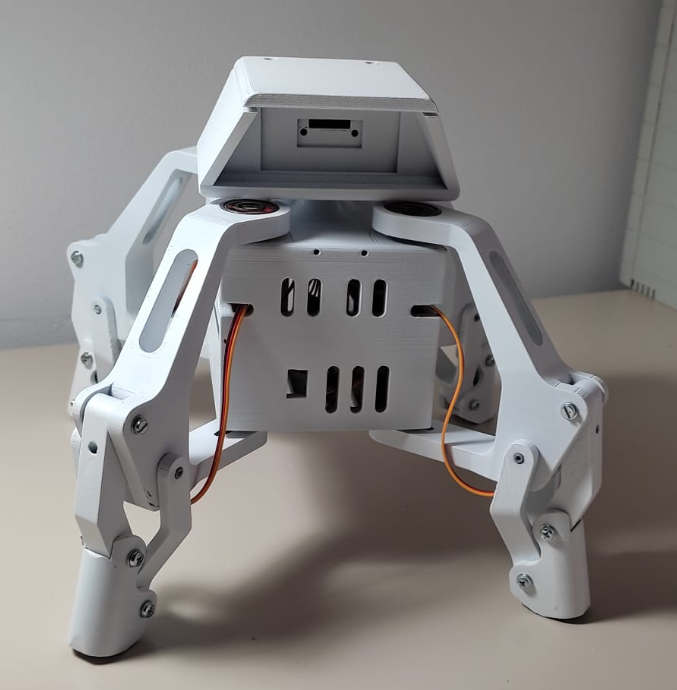
Tras un proceso de investigación en la red observando múltiples robots, se ha optado por desarrollar un robot de cuatro piernas con dos ejes en cada extremidad; utilizando servomotores para su movimiento. En los pies del robot se sitúan sensores que permiten detectar la superficie en que se apoya. Y, además, el robot diseñado cuenta con una cabeza giratoria, donde se sitúa el sensor de distancia y una pequeña pantalla donde se muestra el estado del robot y de sus sensores.
Diseño
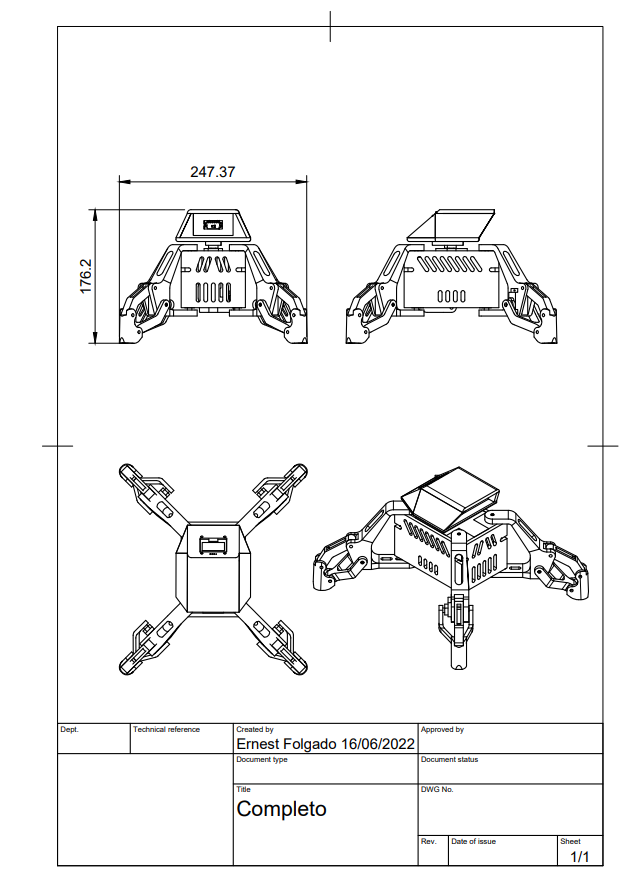
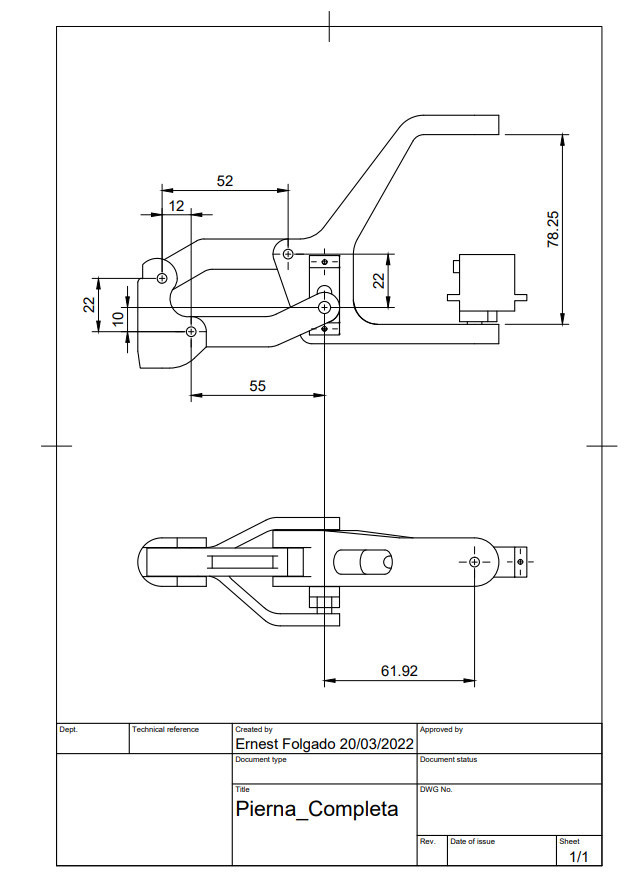
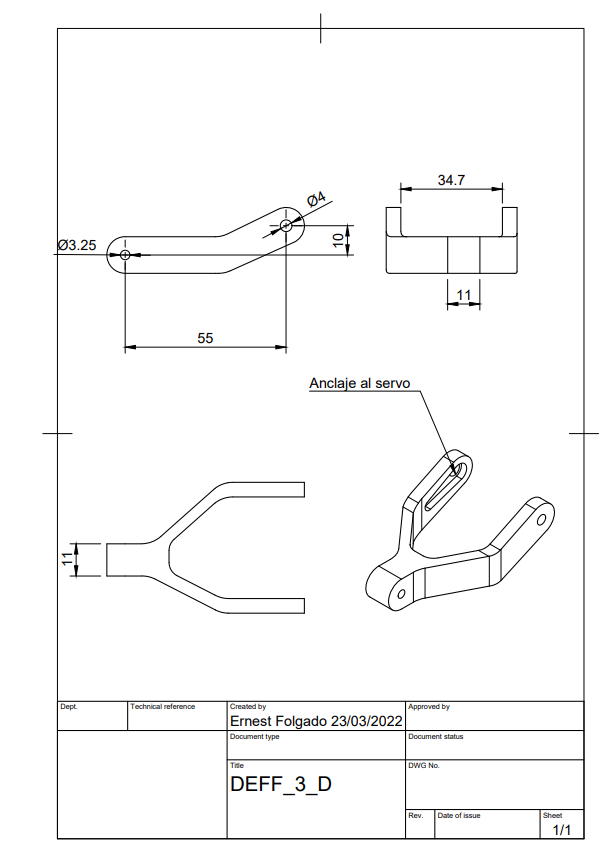
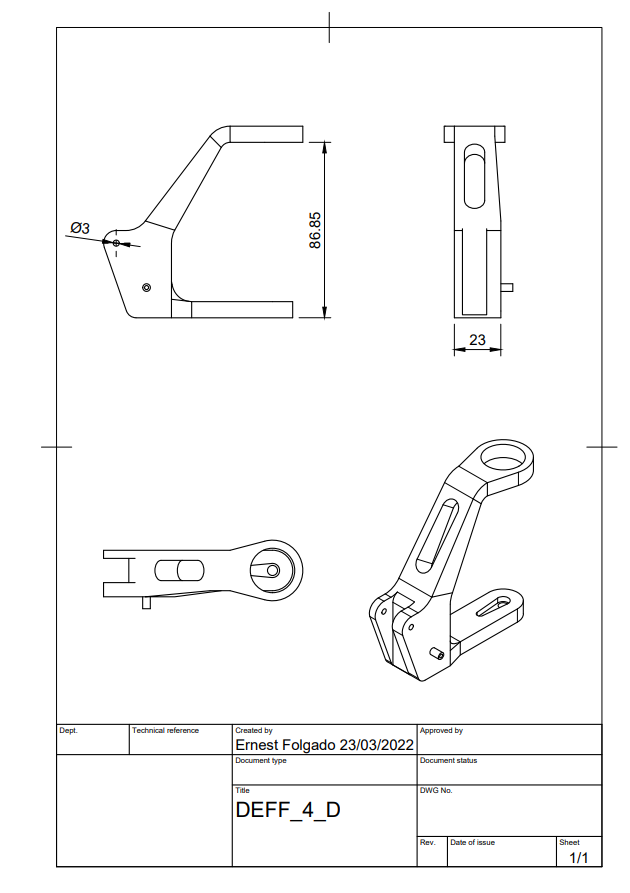
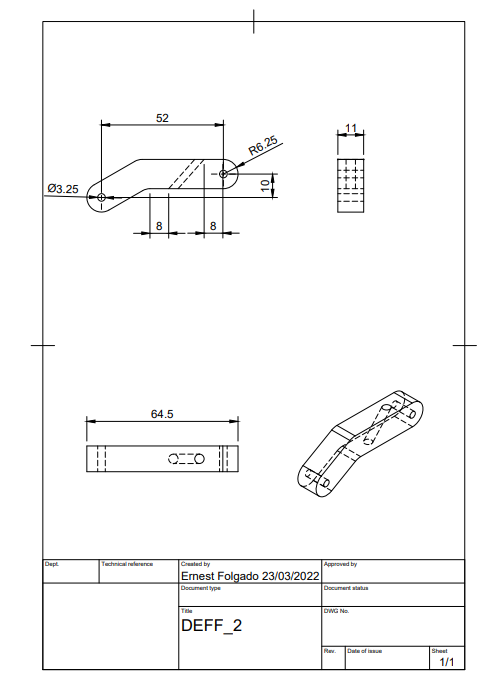
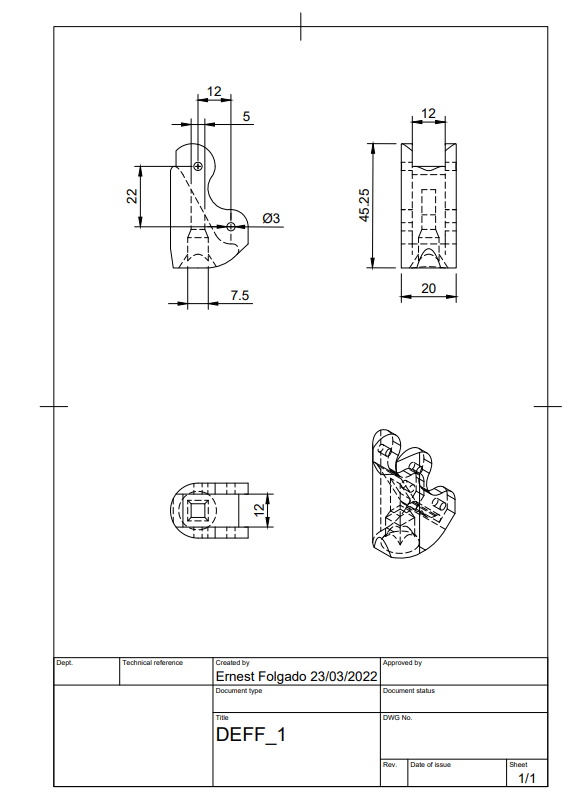
Las piezas han sido diseñadas utilizando Fusion 360. A continuación se pueden observar los planos.
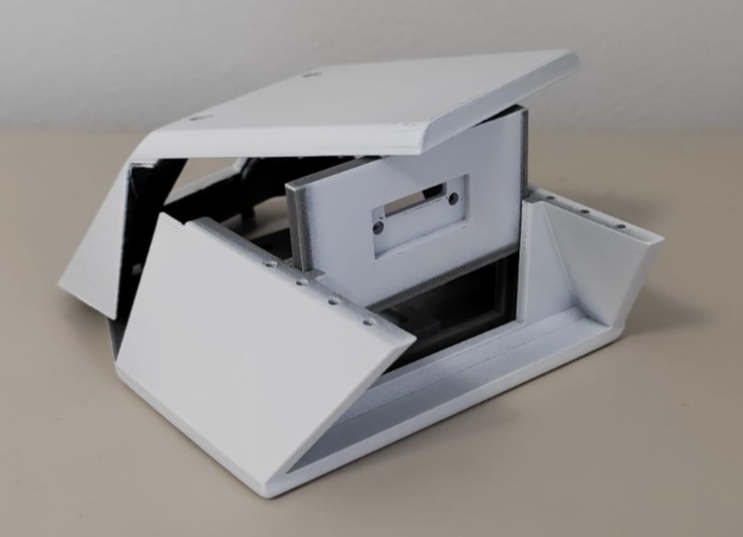
Las piezas impresas se pintaron utilizando pintura en spray color blanco, a continuación se pueden observar la piezas después tras ser pintadas:


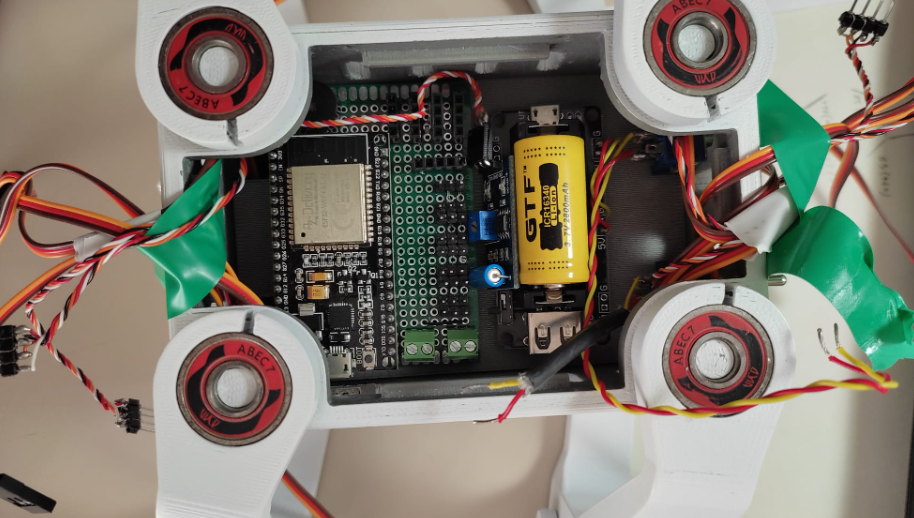
En las siguientes imágenes podemos observar como quedaron las piezas y el robot montado:

Componentes electrónicos
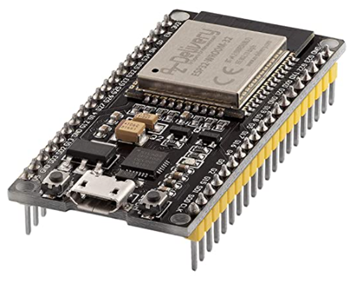
- Kit microcontrolador ESP32 Dev Kit (incluye Wi-Fi y Bluetooth)
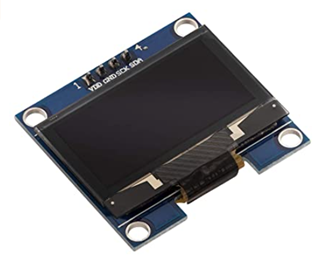
- Pantalla OLED 1,3 pulgadas 128 x 64
- Sensor de proximidad CNY70 (infrarrojos)

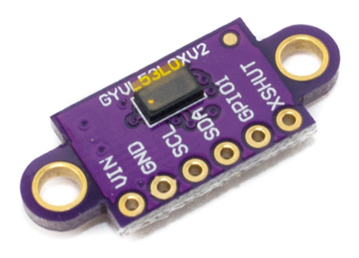
- Sensor de distancia ToF VL53LOX
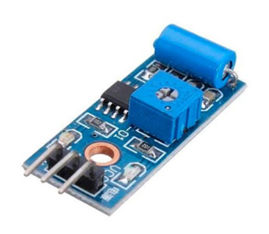
- Sensor de vibración sw-420
- Servomotores MG90S (180º de rotación)

- Power Bank 5000 mAh

- Batería 3,7V 16340 Li-Ion 2800 mAh

- Soporte batería 16340

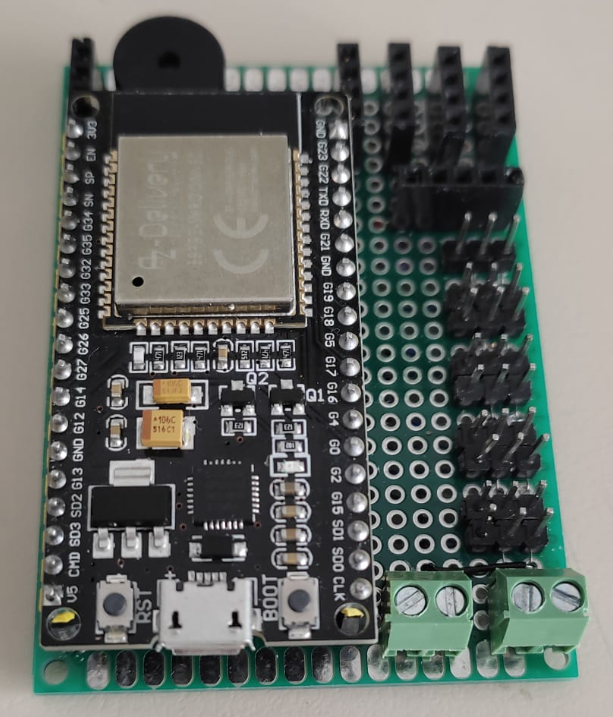
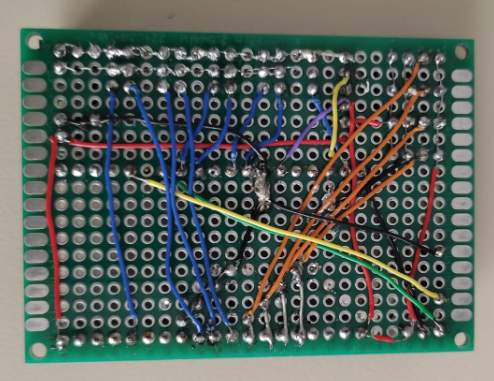
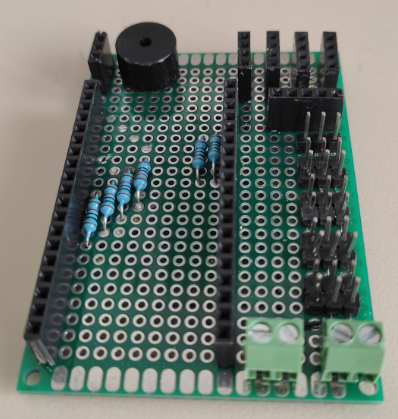
Circuitería
Para conectar los componentes se ha utilizado una placa microperforada
Código
El código ha sido desarrollado con Arduino, para descargarlo haced clic en el siguiente enlace: codigo
Funcionamiento
El robot se controla a través de una aplicación móvil:
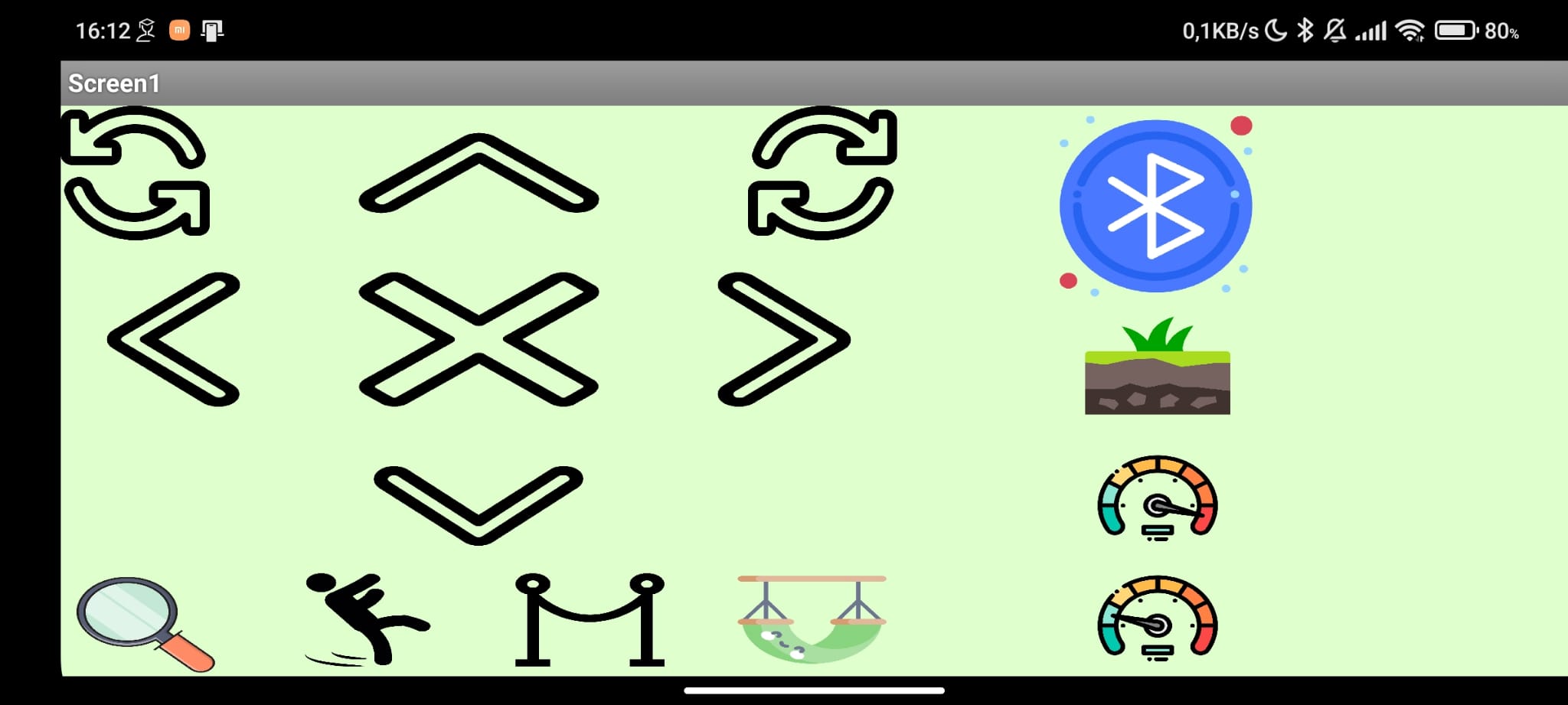
Utilizando la aplicación se puede controlar el movimiento del robot de forma manual y activar los distintos modos de funcionamiento automático. También se puede modificar la velocidad de sus movimiento. Se puede observar su correcto funcionamiento en el siguiente video:
En el siguiente video se muestra como el robot evita obstáculos de forma autónoma.
Robot realizado por Ernest Folgado Brisa
[:]