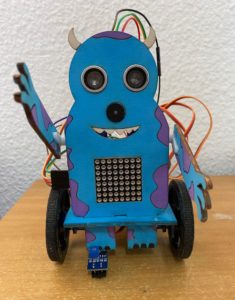
[:es]Mi trabajo va a consistir en crear mi propio robot, este será un vehículo con movimientos giratorios y rectos, que también tendrá una parte frontal con brazos que se podrán mover verticalmente. Para mi DYOR he elegido al personaje de Pixar y Disney, de la película Monstruos SA. Sullivan, dándole un aspecto divertido al robot.
Componentes:
- ESP32 con Wi-Fi y Bluetooth

- Step Up
- PCA9685
- Powerbank
- Sensor ultrasonido HC-SR04
- Zumbador de sonido KY-006
- 2 microservos SG90
- 2 microservos FS90R
- Sensor siguelíneas TCRT5000
- Rueda loca
- 2 Ruedas FS90R
- Matriz de LEDs 8×8
- Piezas obtenidas con corte láser
- Cables de conexión
Ensamblaje
Para el ensamblaje de SulleyBot he utilizado AutoCAD para el diseño de la parte frontal, además de unos brazos para personificar más al robot, y que el parecido a Sulley sea más realista, también para que el robot tenga más funcionalidades.
Y mis planos basados en él, serían los siguientes, donde se puede observar la base y el frontal del robot, que están diseñados para poder obtener las piezas por impresión 2D por corte láser, las líneas rojas indican corte, y las verdes un grabado, para dar más realidad al personaje.
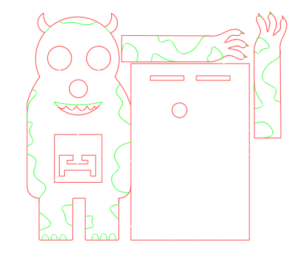
Consistirá en una base donde colocaremos el microcontrolador (que tendrá acceso wifi y bluetooth para poder controlar el robot por medio de una aplicación), la batería conectada al Step Up a ala microcontrolador de servos, una rueda loca que hará a nuestro robot más estable, y dos ruedas controladas por servos de 360º que permitirán dirigir el robot. También tendrá un frontal, donde pondremos el sensor ultrasonido (que le permitirá detectar obstáculos) y el zumbador (que emitirá sonidos) como si fueran los ojos y la nariz del personaje respectivamente. Además, contará con dos servos de 180º que controlarán el movimiento de los brazos, y la matriz de leds colocada en la parte media. Por último, debajo del frontal de colocará el módulo de sensor siguelíneas.
Aplicaciones Autónomas:
Al robot móvil se le han añadido dos tareas autónomas a realizar:
Siguelíneas, utilizando el sensor de siguelíneas, que emite un haz de luz infrarroja y, al detectar el contraste entre la línea y el fondo, el robot puede seguir la trayectoria de la línea de manera autónoma.
Evita-obstaculos, utilizando el Sonar ultrasonido que emite un sonido y mide el tiempo que tarda en recibir el eco de vuelta. A partir de esta información, el robot puede determinar la distancia entre él y cualquier objeto que se encuentre en su camino, SulleyBot irá haciendo su camino, hasta que encuentre un obstáculo cercano, y esta irá girando hasta esquivarlo sin colisionar y poder seguir su camino. Cuando detecte un obstáculo, subirá ambos brazos y se activará el zumbador durante unos pocos segundos, simulando como si estuviera asustando a este obstáculo, y así relacionar su movimiento con el personaje en la película.

Control Remoto:
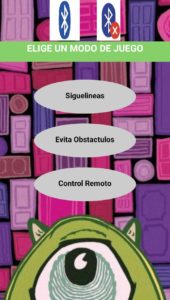
A continuación, podemos ver la interfaz de la aplicación con la que podemos dirigir por control remoto el SulleyBot, utlilizando Mit App Inventor. A través de la App se podrá elegir uno de los tres modos de actuación, su dirección de movimiento o de giro, controlar el movimiento de los brazos e incluso activar una canción.
Esta interfaz de usuario se ha diseñado con botones claros para el control del robot, para que esta aplicación se pueda manejar de forma intuitiva y efectiva. Los colores de la interfaz están basados en los colores representativos del personaje, se presentan a continuación ambas pantallas:

Por último, añadimos un video que muestra algunas de las funcionalidades del SulleyBOT:
[:]