Aprende a diseñar un modelo simplificado del servo SG90, TS90M o FS90R para tu robot DYOR.
A continuación os mostraremos los pasos necesarios para diseñar un servo SG90, TS90M o FS90R para vuestro robot DYOR. El modelo a diseñar es un modelo simplificado para que fácilmente lo podáis hacer en el aula que permita generar posteriormente el sólido necesario para crear el hueco necesario en la base del robot o unirlo junto a la rueda para crear el diseño 3D completo del robot.
Comenzaremos arrastrando la regla a nuestro plano de trabajo (cualquier posición es buena).
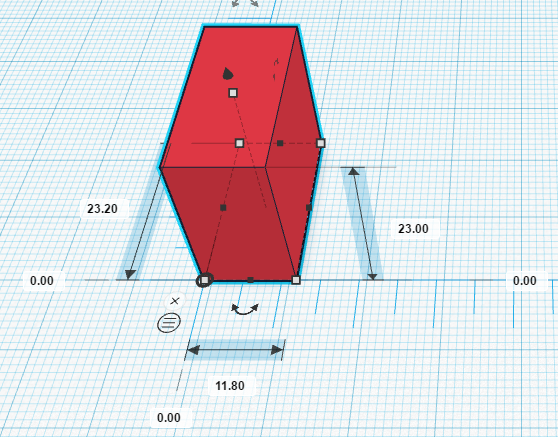
Ahora creamos un cubo y lo posicionamos con respecto al origen de la regla en la coordenada (0,0,0) y establecemos sus dimenciones (11.8,23.2,23), largo, ancho y alto, respectivamente.
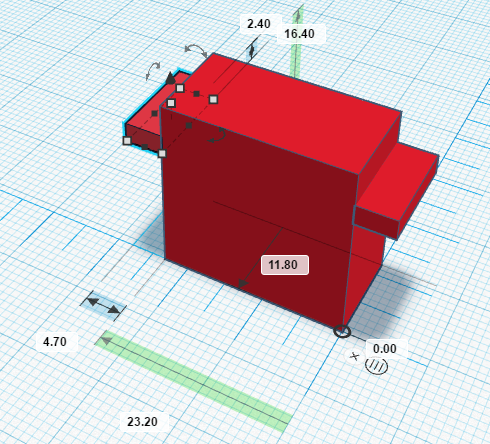
Ahora crearemos las orejas del servo. Son cubos de dimensiones (11.8,4.7,2.4), el primero en la posición (0,-4.7,16.4) y el segundo en la posición (0,23.2,16.4).

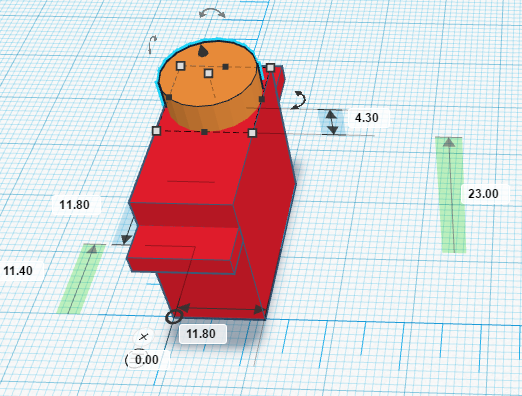
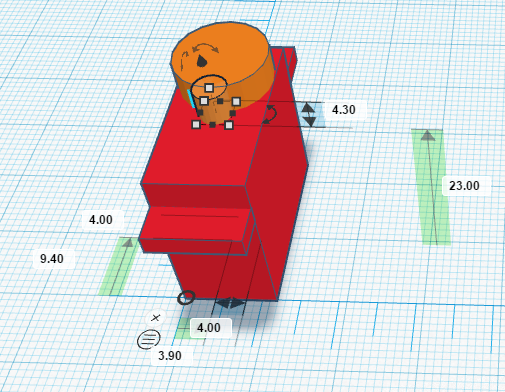
Ahora creamos dos cilindros para representar los engranajes del servo. El primer es de dimensiones (11.8,11.8,4.3) en la posición (0,11.4,23), mientras que el segundo tiene dimensiones () y está en la posición ().
Seleccionamos los dos objetos (pinchando sobre ellos con la tecla SHIFT mantenida) y los agrupamos (CTRL+G).
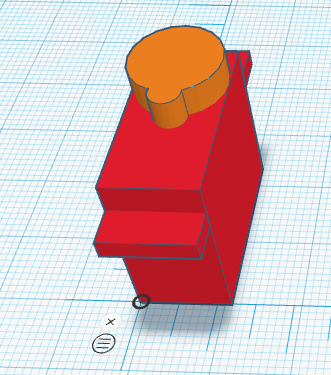
Finalmente creamos un último cilindro para representar la pieza de acople con las ruedas o las palas de los servos. Este cilindro tiene dimensiones (4.8,4.8,3.2) y está en la posición (3.5,14.9,27.3).

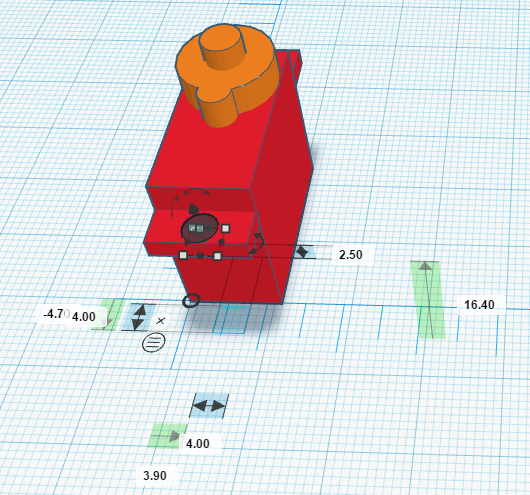
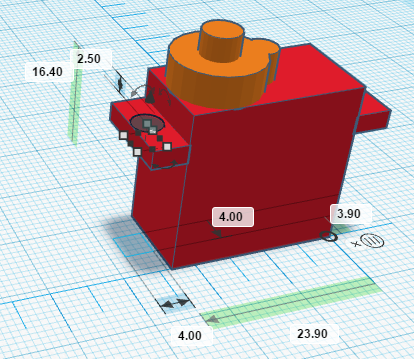
Opcionalmente podemos crear dos cilindros huecos para representar los orificios del servo donde normalmente se atornilla para su sujeción. Los cilindros tienen dimensiones (4,4,2.5) y el primero está posicionado en (3.9,-4.7,16.4), mientras que el segundo está en la posición (3.9,23.9,16.4). Finalmente, podemos agrupar las orejas del servo, el cuerpo del motor y los orificios para atornillarlo utilizando el comando CTRL+G.
Aquí podéis descargar el fichero STL con la solución (sólo para profesores y suscriptores):
