[:es]En esta entrada se muestra el diseño en 2D, componentes, montaje, programación y funcionamiento del robot Wall-e TM realizado por Gabriele Kubiliute en la asignatura de Robótica Móvil de la Universitat Politècnica de València.
Diseño 2D
El diseño del robot Wall-e TM se ha realizado en la aplicación QCAD y se ha hecho en dos partes para posteriormente imprimirlo mediante corte por láser en dos planchas de madera. Por un lado, se ha diseñado la parte frontal con todos los detalles característicos del personaje, la parte trasera, los brazos y la forma de los ojos. Por otro lado, en otra plancha se ha diseñado las dos partes laterales donde van los brazos y la parte inferior del robot.
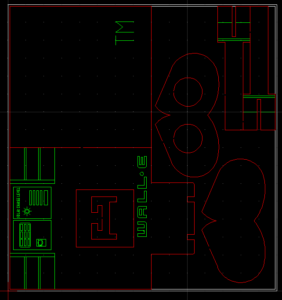
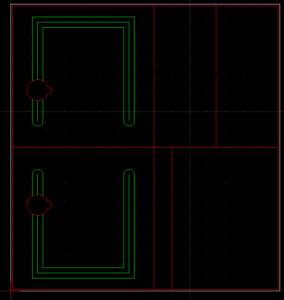
Son diseños realizados por capas en el programa QCAD. La capa blanca marca los límites de tamaño para la cortadora láser, la capa roja indica el corte exterior y la capa verde indica el grabado que va a realizar el láser para poder hacer detalles al diseño.
Componentes
Los componentes se han adquirido a través de la tienda de DYOR de Robótica Fácil, la tienda de robótica y Arduino. Se ha comprado un kit de robótica DYOR de fabricación propia que contiene lo siguiente:
- 1 × Arduino Nano v3.0 (compatible)
- 1 × I/O Extension Shield para Arduino Nano
- 1 × Cable mini-USB (30 cm)
- 1 × Powerbank 3600mAh USB
- 2 × Micro servo FS90R
- 2 × Rueda FS90R
- 2 × Micro servo SG90
- 1 × Rueda Loca
- 1 × Sensor Ultrasonidos HC-SR04
- 1 × Zumbador KY-006
- 1 × Matriz de LEDs 8×8 max7219
- 1 × Módulo Seguilíneas TCRT5000
- 1 × SPP-C Bluetooth (compatible HC-06)
- 1 × Piezas Lego (compatibles)
- 2 × 10 Cables DuPont H-H 20cm
- 1 × Licencia Facilino
Adicionalmente, se ha adquirido un LED RGB en Anillo WS2812 5050 que permite generar colores mediante la interfaz de un solo cable.
Montaje electrónico
Todos los componentes utilizados se conectan de la manera siguiente con el Arduino Nano:
- Micro servo FS90R. Rueda izquierda PWM pin D5. Rueda derecha PWM pin D9.
- Micro servo SG90. Brazo izquierdo PWM pin D6. Brazo derecho PWM pin D3.
- Sensor Ultrasonidos HC-SR04. Echo Digital pin D7. Trigger Digital pin D13.
- Zumbador KY-006. Digital pin D8.
- Matriz de LEDs 8×8 max7219. CS Digital pin D10. DIN Digital pin D12. CLK PWM pin D11.
- Módulo Seguilíneas TCRT5000. Analog pin A0.
- SPP-C Bluetooth (compatible HC-06). RX Digital pin D2. TX Digital pin D4.
- RGB en Anillo WS2812 5050. Digital pin D1.
Pintura y ensamblaje


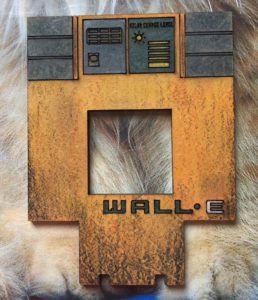
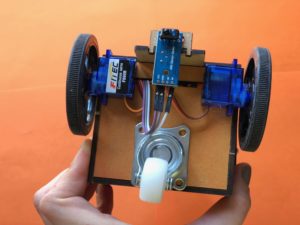
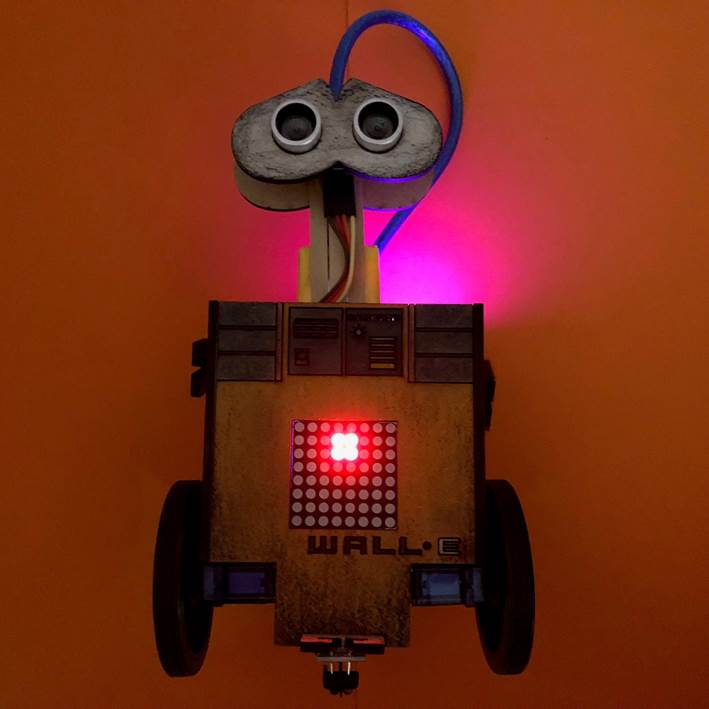
Partiendo de todos los elementos que vienen en el kit de robótica, realizado el corte por láser a las partes que van a constituir el robot y pintadas todas las piezas de la chapa de madera, se conectan todos los componentes electrónicos de la manera descrita anteriormente y se realiza el montaje del Wall-e TM pegando todos los elementos con silicona caliente. Se reviste la batería portátil con papel amarillo para integrarla en el diseño, se le añade una tapa de metacrilato naranja para cubrir la parte superior del robot, como también unos palitos de madera para realizar el soporte de los ojos del robot. El resultado que se ha obtenido se puede ver en las siguientes fotos:


Funcionamiento
Para hacer funcionar a todo este montaje se ha realizado una aplicación móvil para Android con MIT App Inventor. En la parte superior están situados los botones para poder conectarse y desconectarse del robot mediante bluetooth y un botón de salir de la aplicación. Wall-e TM consta de 5 modos de funcionamiento que se pueden ir cambiando mediante los botones creados en la app.

Seguimiento
En este modo el robot sigue a la persona que esta detectando mediante el sensor de ultrasonidos situado en sus ojos. Mide la distancia hasta esa persona y a partir de ahí calcula la velocidad con la que debe seguirla. Cuanto más alejada la persona más veloz será el robot y viceversa, cuanto más cerca esté la persona más lento se moverá el robot, llegando incluso a pararse cuando la distancia es muy corta.
Evasión de obstáculos
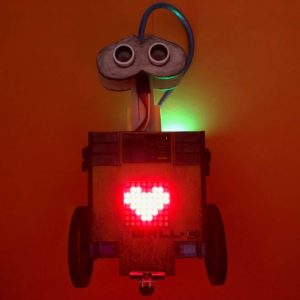
En este modo, cuando el robot detecta un obstáculo empieza a emitir luces rojas con su matriz RGB en anillo y sonidos para avisar de que ha encontrado algo con lo que podría chocar. A la vez realiza un giro sobre sí mismo hasta que deja de detectar obstáculos para poder empezar de nuevo su ruta. En la matriz de LEDs también se muestra una figura con X para mostrar que ha detectado un obstáculo. Cuando no detecta ninguno, en la matriz LEDs se dibuja un corazón y en la matriz RGB se encienden LEDs verdes.

Acelerómetro
En este modo manual el robot se controla a través del acelerómetro del móvil. Inclinándolo más o menos se consigue una mayor o menor velocidad en el movimiento del Wall-e TM. Se han programado los movimientos hacia adelante, hacia atrás, hacia la derecha y hacia la izquierda con tres velocidades distintas en cada uno de ellos y el modo parada. A su vez, la velocidad que tiene se muestra en la pantalla de la aplicación. También, la matriz de LEDs se va encendiendo en función de la dirección del robot y la velocidad que tiene. Por otro lado, en la matriz RGB se muestra la dirección que el robot lleva en ese momento mediante unas flechas dibujadas con los LEDs de la matriz.





Guiado Manual
En este modo manual el robot se controla mediante unos botones que aparecen en la aplicación cuando entras en este modo. Se ha programado de tal manera en que cuando mantienes pulsado el botón se le proporciona velocidad al robot y, cuando no mantienes presionado ninguno, el robot está parado.

Neutro
En este modo el robot está en una posición de velocidad nula, posición neutra que permite que llamemos al robot para encontrarlo fácilmente. En la pantalla aparece un mensaje indicando que puedes agitar el móvil para llamarlo y esto se ha hecho gracias a la función Shaking del acelerómetro de la aplicación. Cuando agitas el móvil, el robot mueve los brazos y emite una señal acústica con el Zumbador para que el usuario sepa donde se encuentra.

Resultados y vídeo
Finalmente, este es el resultado obtenido de la fabricación y programación del robot Wall-e TM. En el vídeo se muestran varias de las funciones más visuales que se han explicado anteriormente. Espero que les guste!

Vídeo
[:]