[:es]En esta publicación se pretende mostrar el diseño, montaje y programación de Stormtrooper DYOR, junto a unas imágenes del mismo. El robot se ha realizado por Francisco Javier López Nácher, alumno de la asignatura de Robótica Móvil en la Universitat Politècnica de València.
Diseño 2D
El diseño del Stormtrooper se ha realizado utilizando el programa de QCAD. La base del robot se ha mantenido respecto la plantilla original, mientras que el diseño del Stormtrooper y de su arma se ha desde cero.
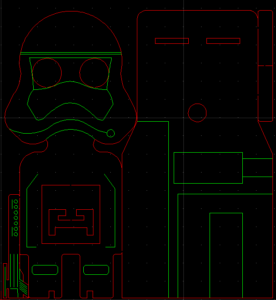
Destacar que las líneas rojas implican corte exterior mientras que las líneas verdes simplemente es un pequeño grabado en la madera.
Componentes
Los componentes se han comprado a través de la tienda DYOR. En concreto, existe un kit de robótica «DYOR Fabricación Propia» el cual incluye los siguientes elementos:
- Arduino Nano v3.0 + Shield Arduino Nano I/O
- Piezas Lego
- Cable Mini-USB
- Powerbank
- Ultrasonido HC-SR04
- Zumbador de sonido
- Servos SG90
- Servos FS90R
- Bluetooth
- Seguilíneas TCRT5000
- Rueda loca
- Ruedas FS90R
- Matriz de LEDs
- Cables macho-hembra
Montaje
Una vez cortadas las piezas, se ha pintado y ensamblado. Todos los componentes mencionados se han interconectado de la siguiente forma:
- Ultrasonido HC-SR04. ECHO Digital pin D7.TRIGGER Digital pin D13
- Zumbador de sonido Digital pin D8.
- Matriz de LEDs. CS pin Digital D10. DIN pin Digital D12. CLK PWM pin D11
- Servos FS90R. Rueda izquierda PWM pin D5. Rueda derecha PWM pin D9
- Servos SG90. Brazo izquierdo PWM pin D6. Brazo derecho PWM pin D3.
- Seguilíneas TCRT5000 pin Analog A0.
- Bluetooth. RX Digital pin D2. TX Digital pin D4.



Funcionalidad
Mediante la ayuda de Facilino, se ha creado un código para el Stormtrooper. Dicho código interactúa con la aplicación móvil para realizar los diferentes movimientos que se exponen a continuación. La aplicación móvil se ha generado con MIT App Inventor.
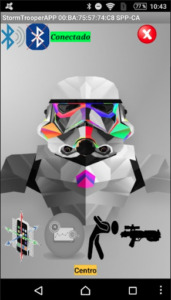
La parte superior de la aplicación contiene los botones para realizar la conexión/desconexión con el módulo Bluetooth. Una vez establecida la conexión, el móvil vibra para avisar que se ha realizado con éxito. Además, existe un botón para salir de la misma.
En la parte inferior aparecen los botones con los diferentes movimientos disponibles. Dichos botones se han programado en la aplicación para que trabajen como botones de enclavamiento, de tal manera que se entra y sale del modo con el mismo botón. A continuación se explica cada una de las funcionalidades de los botones, empezando de izquierda a derecha.
Acelerómetro
La funcionalidad de acelerómetro consiste en utilizar el acelerómetro del móvil para mover nuestro robot. En este caso, inclinando el móvil hacia delante o hacia atrás, el robot se mueve en esa dirección. Si se inclina el teléfono hacia la izquierda o hacia la derecha, el Stormtrooper gira sobre si mismo. Para cada dirección, se han programado 3 velocidades, que se incrementan respecto al grado de inclinación. En posición horizontal, el robot para. Además, en la matriz de LED’s se muestran de manera continua la dirección que tiene el robot en cada momento.
Movimiento agresivo
La siguiente funcionalidad consiste en que el Stormtrooper persigue a un objeto móvil, como por ejemplo una persona, y se detiene a una cierta distancia. En esa distancia, levanta el arma y dispara de manera continuada. Si el objeto se mueve, el robot le persigue hasta volverse a colocar a la distancia objetivo.
Evasión de obstáculos
El robot se mueve constantemente por el entorno y cuándo detecta un objeto mediante el sensor de ultrasonidos dispara, gira a la derecha y sigue moviéndose. Al disparar levanta el brazo que porta el arma y emite un sonido emulando el sonido del bláster de las películas.
Modo disparo
El robot levanta de manera alterna los brazos, junto al arma, y dispara de manera continuada. Además, suena el mítico sonido de Bláster de las películas de Star Wars.
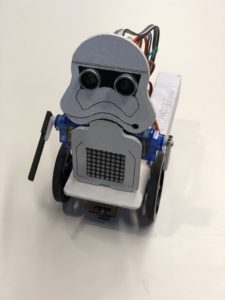
Fotos y vídeo del robot


Vídeo
[:]