[:es]Diseño, montaje y programación del robot DYOR con diferentes funcionalidades y conectividad bluetooth.
Robot PandaBot:
Diseño:
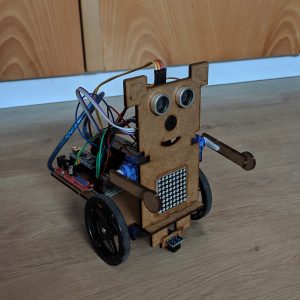
Para el diseño del trabajo que se va a exponer a continuación se ha utilizado el robot DYOR ya existente denominado PandaBot. Se trata de un robot con dos ruedas motrices y una rueda loca, que además implementa sensores y servos para la realización de diferentes funcionalidades, como evita obstáculos, sigue líneas, coger objetos, etc.
Componentes utilizados:
- Estructura de madera realizada por corte láser
- Arduino Nano 3.0
- I/O Extensión Shield para el Arduino
- Powerbank
- 2x micro servo FS90R
- 2x rueda FS90R
- 2x micro servo SG90
- Rueda giratoria libre
- Sensor ultrasonidos HC-SR04
- Zumbador KY-006
- Matriz LED 8×8 max7219
- Módulo siguelíneas TCRT500
- SPP-C Bluetooth
- Cables DuPont Hembra-Hembra 20 cm
- Pegamento Loctite
Funcionalidades:
El robot DYOR cuenta con gran cantidad de sensores y servos para implementar funcionalidades diferentes. En este proyecto se ha hecho una selección de las que se consideraban más atractivas, ya que no se disponía de mucho tiempo. Una ventaja grande de este robot es que al tener todo implementado físicamente, siempre se podría ampliar y añadir funciones cambiando el código del Arduino.
Las funciones principales que se han diseñado y programado son:
- Sigue líneas: mediante un sensor de infrarrojos ubicado en la parte baja del robot, se detecta la línea negra en contraste con el blanco del suelo de alrededor de la línea, y el robot es capaz de seguir dicha línea.
- Evita obstáculos: el robot dispone de un sensor de ultrasonidos sonar, y ha sido programado de forma que avanza hacia delante, y si cuando detecta un objeto a menos a 12 centímetros, se para, gira 90 grados a la izquierda, y si detectara otra vez algún obstáculo, gira 180 grados para ir hacia la derecha de la posición inicial.
- Emociones: se muestran por la matriz led del frontal del robot distintas caras con emociones; feliz, triste, enfadado, enamorado y sorprendido.
- Control por bluetooth: el robot se puede controlar con botones en la aplicación android. Dispone de 5 botones; hacia delante, hacia atrás, gira izquierda, gira derecha y paro. Además, dicha aplicación permite activar y gestionar todas las funciones mencionadas anteriormente.
Código de Arduino
A continuación se adjunta el código del proyecto. Se ha desarrollado utilizando conceptos y funciones de facilino, ya que simplificaba mucho la tarea. El código contiene todo lo mencionado anteriormente.
Autor:
Santiago Ramírez Solana[:]