[:es]En esta entrada se mostrará el diseño de un robot DYOR tematizado y diseñado como Drácula.
A continuación, te proporcionaremos una serie de apartados que te servirán como guía para construir tu propio robot DYOR siguiendo el mismo enfoque utilizado en este diseño.
ESQUEMAS Y PLANOS DEL ROBOT
A continuación se adjuntan los planos del robot móvil listos para impresión 3D por corte láser. Los planos de la maqueta del DYOR (Do Your Own Robot) se han realizado mediante el programa AutoCAD, creando posteriormente un archivo .dwg. Como se puede observar posteriormente, el diseño del robot se ha basado en el típico vampiro “Drácula” de dibujos animados, acompañado de los elementos típicos que conformarán las articulaciones y el diseño final del robot (murciélagos, cuz, estaca, martillo; además de la base). En rojo se muestran las líneas que se cortarán con láser, en verde los grabados y en negro los componentes electrónicos (powerbank, microcontrolador, …)
En el enlace posterior se puede descargar el archivo de AutoCAD en formato .zip:
MATERIALES Y COMPONENTES ELECTRÓNICOS
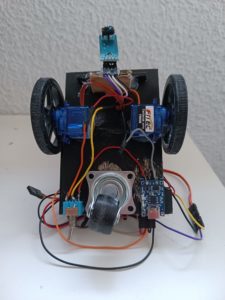
El robot móvil diseñado es un modelo basado en el DYOR con temática de «Drácula», inspirado en el personaje de dibujos animados. Controlado por un microcontrolador ESP32, está equipado con diversos sensores y componentes que le permiten realizar tareas autónomas. Entre ellos, se encuentra un sensor de ultrasonidos (sonar) HC-SR04 para detectar obstáculos, un buzzer HY-006 para generar sonidos y alertas, microservos SG90 y FS90R para controlar los movimientos y articulaciones, respectivamente, y un sensor seguilíneas TCRT5000. El robot también cuenta con una matriz de LEDs 8×8, ruedas modelo FS90R y una rueda loca para la movilidad. Se alimenta mediante un powerbank y se utiliza programación junto con cables para la conexión de los componentes. En términos de funcionalidades autónomas, el robot puede seguir líneas gracias al sensor TCRT5000 y evitar obstáculos utilizando el sensor sonar HC-SR04. Además, puede generar sonidos y alertas mediante el buzzer HY-006.
A continuación se detallan en una lista:
- Microcontrolador ESP32 con Wifi y Bluetooth integrados
- Sensor de ultrasonidos (sonar) modelo HC-SR04
- Zumbador o Buzzer de sonido modelo HY-006
- Microservo modelo SG90
- Microservo FS90R
- Sensor seguilíneas TCRT5000
- Matriz de LEDs de tamaño 8×8 (64 LEDs)
- Ruedas modelo FS90R
- Powerbank (en este caso, se hizo uso de una Batería LiPo 2000mAh+ módulo de carga + elevador Boost)
- Rueda loca (caster)
- Cables para las conexiones
- Piezas grabadas con corte láser para el montaje del robot
APLICACIONES AUTÓNOMAS DEL ROBOT
El robot móvil diseñado tiene la capacidad de realizar dos tareas autónomas: seguir líneas y evitar obstáculos. Para seguir líneas, utiliza el sensor seguilíneas TCRT5000 ubicado en la parte inferior del robot. Este sensor emite luz infrarroja y detecta el contraste entre la línea negra y el fondo, permitiendo al robot seguir la trayectoria de la línea de forma autónoma. En caso de encontrar un obstáculo, el zumbador emitirá un sonido y el robot realizará movimientos en sus articulaciones mientras la matriz de LEDs se ilumina.
Para evitar obstáculos, el robot emplea el sensor de ultrasonidos HC-SR04 ubicado en la parte frontal. Este sensor emite sonidos y mide el tiempo que tarda en recibir el eco, lo que le permite determinar la distancia entre el robot y los objetos en su entorno. Si se detecta un obstáculo a una distancia predefinida en el código de programación, el robot realizará automáticamente una maniobra para evitar la colisión. Además, cuando el robot se acerque demasiado a un objeto, el zumbador emitirá pitidos y la matriz de LEDs se iluminará.
A continuación se muestra un breve video donde se puede observar esta aplicación:
APLICACIÓN DESARROLLADA
La interfaz de usuario consta de dos secciones principales: una barra de menú en la parte superior y botones de control en la parte inferior. La barra de menú proporciona acceso a diversas opciones y configuraciones de la aplicación, mientras que los botones de control permiten al usuario mover el robot hacia adelante, hacia atrás, girar a la izquierda o a la derecha, y activar o desactivar la detección de línea y obstáculos. La aplicación ha sido diseñada mediante la plataforma appInventor pensando en la facilidad de uso y la intuición, con botones grandes y claros para las funciones de control. En general, la interfaz de usuario busca proporcionar una experiencia agradable y efectiva para el control del robot móvil.
CONCLUSIONES Y LIMITACIONES
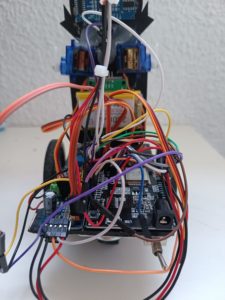
Hay que tener en cuenta varios factores a la hora del montaje, sobre todo aspectos electrónicos que son los que más pueden dar lugar a errores. Por ejemplo, que los motores tengan una buena pila para que todos estén alimentados correctamente y no se reinicie el programa por falta de alimentación, el buen cableado/soldaduras para no provocar cortocircuitos y así dañar los componentes o hacer que el robot no funcione correctamente, entre otros.
Este proyecto ha sido una experiencia de aprendizaje enriquecedora en el ámbito de la robótica, programación y electrónica. A lo largo del curso, se ha adquirido conocimiento no solo en la creación y programación de robots, sino también en la implementación de circuitos de alimentación. Aunque se han enfrentado limitaciones y desafíos, especialmente en el aspecto electrónico, que han dificultado el desarrollo de todas las funcionalidades deseadas, el proyecto ha sido interesante y ha permitido adquirir nuevos conocimientos desde el diseño de la aplicación hasta el montaje y programación del robot. En general, ha sido una experiencia valiosa con un gran aprendizaje.
GALERÍA DE IMÁGENES

AUTOR
Adrián Sánchez Martínez.
[:]