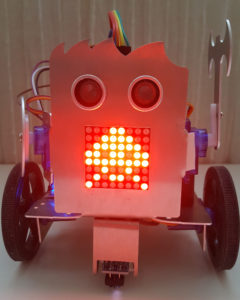
In this entry, I’ll describe Christian, my robot made with an Arduino Nano, sensors and actuators and the mobile app I developed to control it.
DYOR-Christian
Design
The robot design was made using Solidworks and the whole block that defines the robot structure was obtained from an aluminium sheet by laser cutting. Later this sheet was bent in the laboratory of the university to obtain the desired shape.

Components
- Servos: two SG90 servos for the arms and two FS90R servos for the wheels.
- Arduino Nano
- Powerbank
- 8×8 LED Matrix
- Caster Wheel
- 10 DuPont Cables
- Line Tracker TCRT500
- Bluetooth HC-06
- Sonar HC-SR04
- Buzzer
Main Features
I used Facilino to obtain a first draft of the code and later I focused on some aspects of the robot directly on the Arduino code.
Basically, what we can do with this robot is:
- Moving it using a console (buttons)
- Moving it using the phone’s accelerometer
- Implement an autonomous control using a line tracker
- Use the sonar sensor to avoid collisions while the robot is following a line
Mobile App
The app was developed using the MIT platform AppInventor 2. Through this app it is possible to connect to the robot using the Bluetooth module to move it from one point to another, to use sensors and moving its arms.


Looking at the app interface we can see different elements:
- The console in the middle of the interface allows us to move the robot by clicking on the five buttons as well as the axe and the shield which control the left and right arm respectively.
- The buttons on the right are related to the “feelings” of the robot, it can show us a smile, a heart or just say “Hi!” using the led matrix.
- By pressing the buttons on the left part, the robot starts to sing a song or to reproduce a note.
- In the upper part there are the buttons related to the sensors, the Bluetooth button is used to select the robot we want to connect, the door to close the connection, the car represents the possibility to control the robot with the accelerometer, the road activates the line tracker sensor and the sound wave combines the information coming from the line tracker and the sonar to avoid collision when following a line.
- Finally, the stop button is necessary to stop using the sonar or line tracker and control the robot by console or using the accelerometer.
Videos
Download
Here you can download the Arduino code of the robot
Autor
Enea Paracampo