[:en][:en]In this blog entry we will show you the design of the robot DYOR Iron Man. It is controlled by an Arduino Nano and an Android app.
DYOR Iron Man
Design
The DYOR Iron Man’s design is original, and the appearence has been designed in AutoCAD as it can be seen in the next drawing picture.
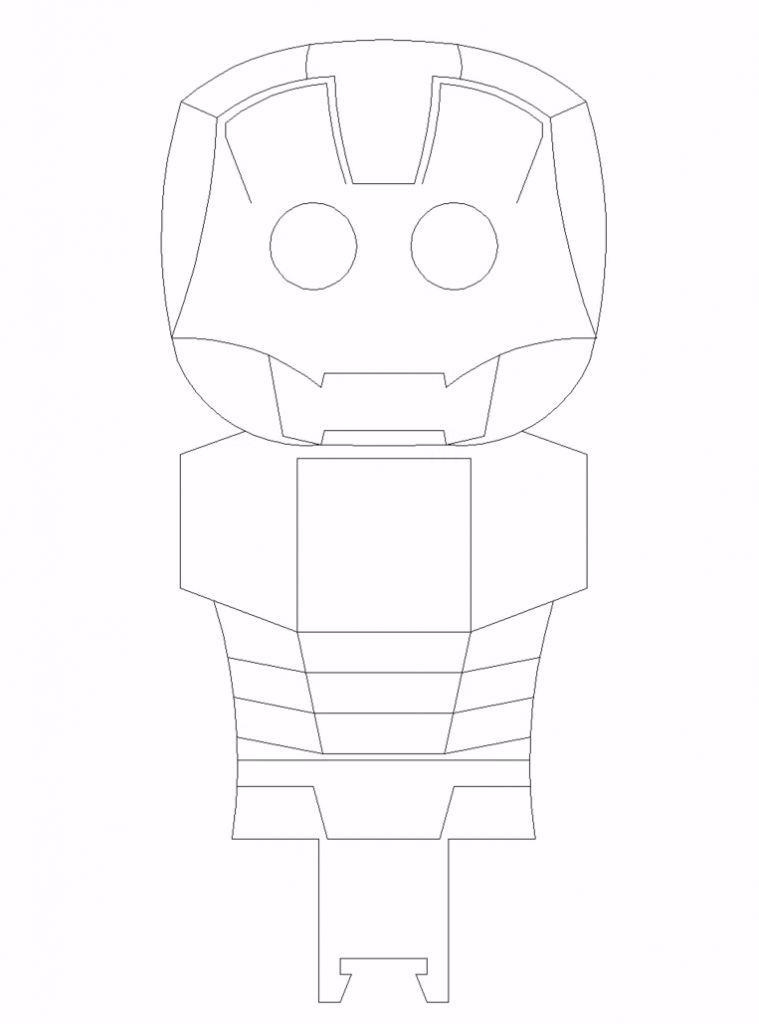
DXF file can be extracted from this drawing to manufacture it by laser cutting.

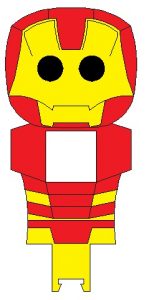
Once this design is done the next step is to apply color to it. This could be done with Paint.
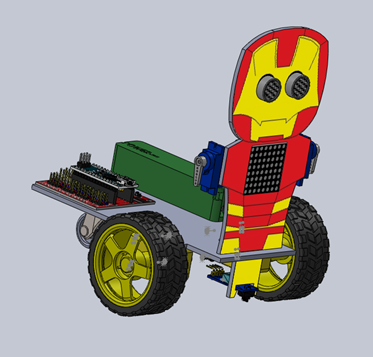
This image can be attached in SolidWorks as a custom appearance and applied to the solid Iron Man part. This is an image of most of the robot components assembled in SolidWorks.
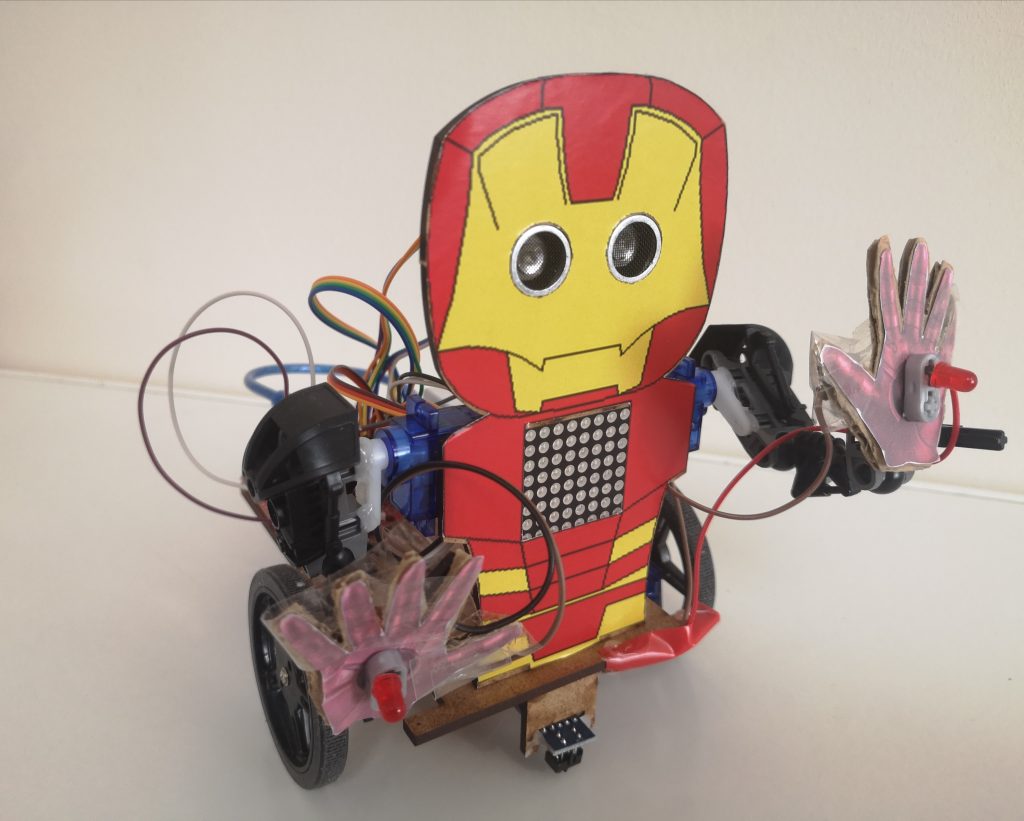
The robot has two servos attached at the back, which will provide the movement of the arms, these ones have a red LED placed in each hand made of cartoons. It will recreate the repulsor shoot of Iron Man by turning on the LED. At the end instead of DC motors it’s been used FS90 mini servos for moving the base robot. The LED matrix is placed in the square hole of Iron Man simulating the ARC core.
Electronic components
- 1x Arduino Nano v3.0
- 1x I/O Extension Shield for Arduino Nano
- 1x mini-USB cable (30 cm)
- 1x Powerbank 3600 mAh
- 2x FS90R micro servo
- 2x FS90R Wheel
- 2x Micro servo SG90
- 1x Caster wheel
- 1x HC-SR04 Ultrasound sensor
- 1x KY-006 Buzzer
- 1x 8×8 LEDs Matrix max7219
- 1x TCRT500 Line-following module
- 1x SPP-C Bluetooth module (HC-06 compatible)
- 3x 10 DuPont Cables (Wire,Lead) Female-Female F-F 20cm
- 2x Red LED
- 2x 220 ohm resistance
- 2x Bionicle arms
A glue gun has been used to assemble all the components.
Applications
It has been implemented an obstacle avoidance application, line following and remote control with a smartphone app.
Obstacle avoidance
In this application the robot is moving forward with the circle showed in the LED matrix until an obstacle is detected. When this happens, the robot turns left and keeps moving forward until detecting another obstacle with the Ultrasound sensor.
Line following
In this application the robot is able to follow a black line drawn on the floor. The velocity of the wheel is proportional to the quantity of light received by the Line-following module. So when the value corresponds to «white», it keeps moving forward, but when a «black» value is detected the robot starts turning.
Smartphone app
In order to control the robot it is necessary an Android smartphone to install the app. This app can be connected to the robot through the SPP-C Bluetooth module, which is used by the DYOR. It will receive the necessary commands sent by remote control. The app has been developed with the platform MIT, App Inventor 2.
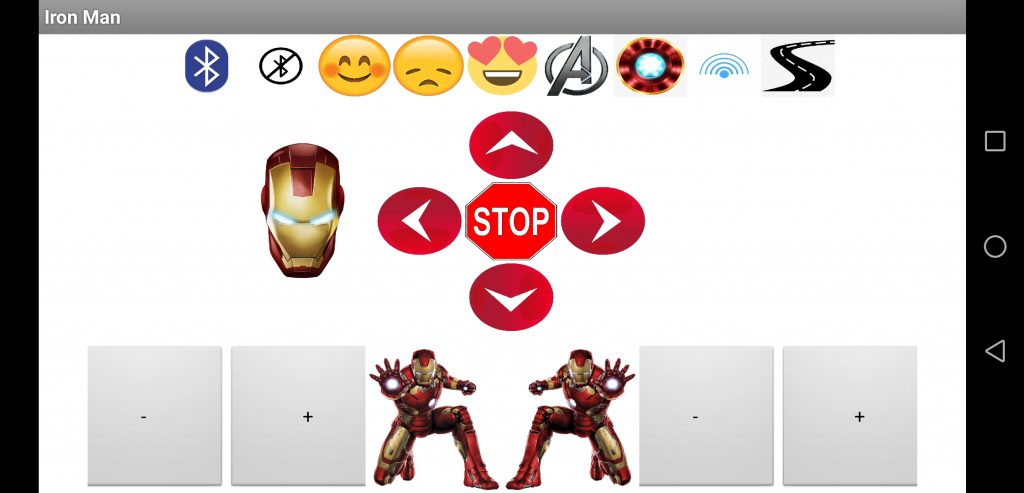
The app has several buttons:
- Top screen: buttons for connecting and disconnecting bluetooth devices; expressions such as happy, sad, being in love; A of Avengers (when pressed the avengers theme is played in the buzzer at the same time that an A is showed in the LED matrix) and the ARC core button (a circle in the LED matrix is displayed).
- Middle screen: Iron Man’s helmet (when touched it displays the Avengers song from the smartphone), arrows to move the robot forwards, backwards, left or right and the stop button.
- Bottom screen: the ‘+’ and ‘- ‘buttons are for moving arms up (+) or down (-). The buttons in the left for the left arm and the buttons in the right for the right arm. In addition, it has two buttons for shooting, when they are pressed (right Iron Man for shooting the right arm and the same with the left Iron Man button) the red LED’s turns on and a the sound of a repulsor shoot is displayed in the smartphone.
Videos
In this video is shown the Bluetooth app.
Next video is about obstacle avoidance.
Now the Line-following video.
Downloads
Autor
Néstor Romero Llop
[:][:]