This blog post will give a short overview of the DYOR Imperial bot, I named it Mini V.
Components
The robot is made out of the following components
- Lasercutted Darth Vader pieces
- Arduino Nano v3.0
- I/O Extensio Shield for Arduino ano
- 1 mini-USB cable
- A 3600 mAh powerbank
- 2 FS90R micro servo’s
- 2 FS90R wheels
- 2 SG90 micro servo’s
- 1 caster wheel
- 1 ultrasonic HC-SR04 sensor
- 1 zumbador KY-006 buzzer sensor
- 1 8×8 LED matrix display
- 1 TCRT500 sensor for line following
- 1 SPP-C Bluetooth sensor (HC-06 compatible)
- Cables
Design
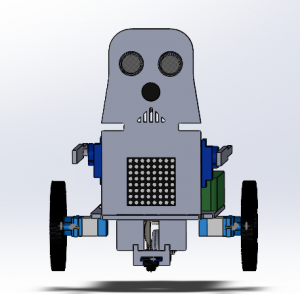
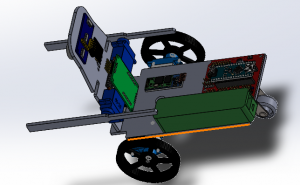
The robot assembly was made in Solidworks. The different parts were provided beforehand and to be put together.
Assembly
All the parts were bought in a package. I assembled all the parts accordingly. We colored the front of the robot in black and gave it a black cape to resemble Darth Vader.


Functionalities
Mini V has three main functionalities:
- Bluetooth remote control: The robot can be controlled remotely using the app. It does this by sending commands to the SPP-C bluetooth module.
- Obstacle avoidance: In this mode the robot will detect obstacles using the ultrasonic sensors. It will display a sad face on it’s LED matrix when this happens. If the obstacle comes closer the robot will drive backwards.
- Line following: Using the TCRT500 optical sensor, the robot can follow a black line.
App design and programming
The mobile app used for this project was a really simple app made with MIT App inventor starting from the application provided by the teacher.
The programming was done in Arduino with help from the Facilino software. With usage of the Facilino license, I was able to use the code provided and combine everything to get the functionalities working. I had no specific difficulties with the implementation of the code.