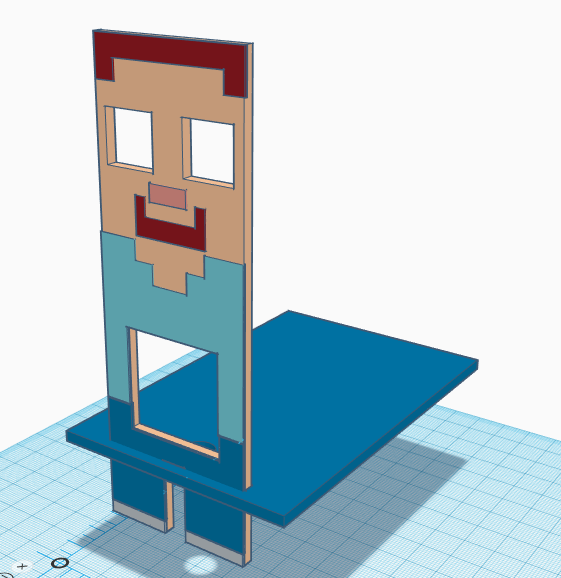
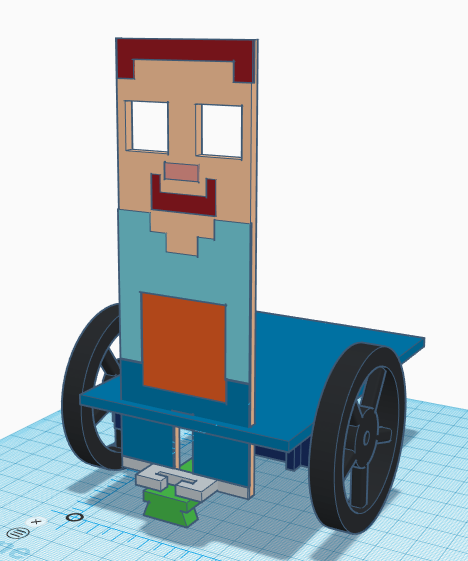
In this entry, we show the assembly of DYOR SteveBot. It’s a square bot!
Components:
- Arduino Nano + Shield Arduino Nano I/O (sand)
- Powerbank (light orange)
- Ultrasound HC-SR04 (light grey)
- Buzzer (black)
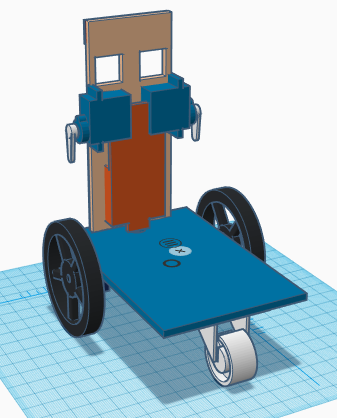
- Servos SG90 (dark blue) in the frontal face
- Servos FS90R (dark blue) in the base
- Bluetooth (orange)
- Linetracker TCRT5000 (green)
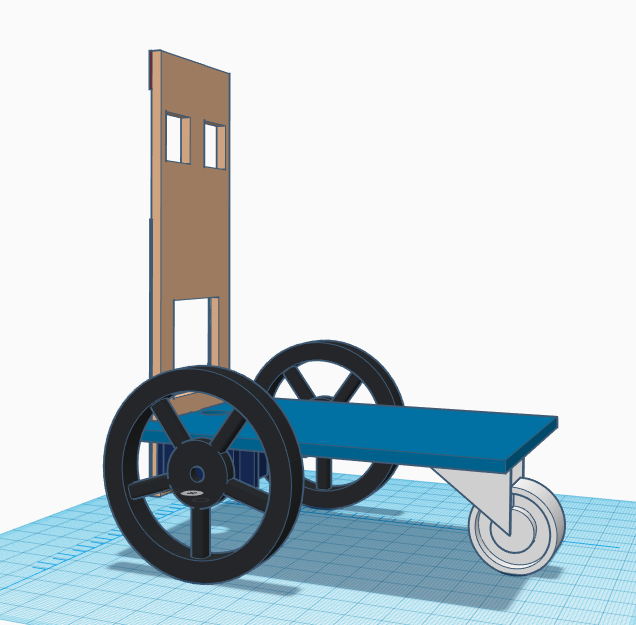
- Caster wheel (white)
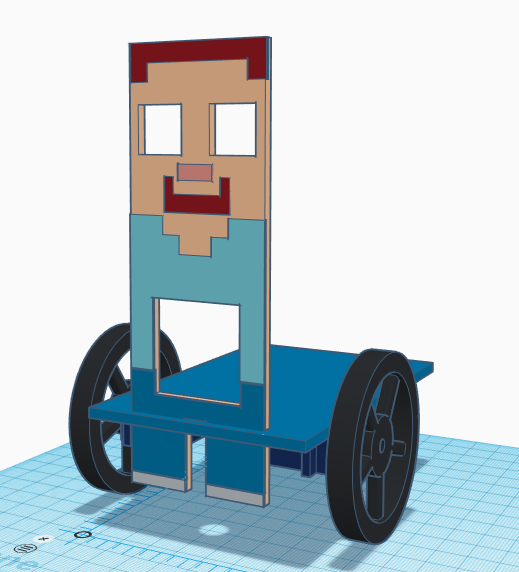
- FS90R wheels (black)
- LED Matrix (orange)
Instructions:
Glue both parts, the base and the frontal face.
Glue the FS90R servos to the base, the servo axis has to be as far as possible to the frontal face and screw the wheels to the servos.
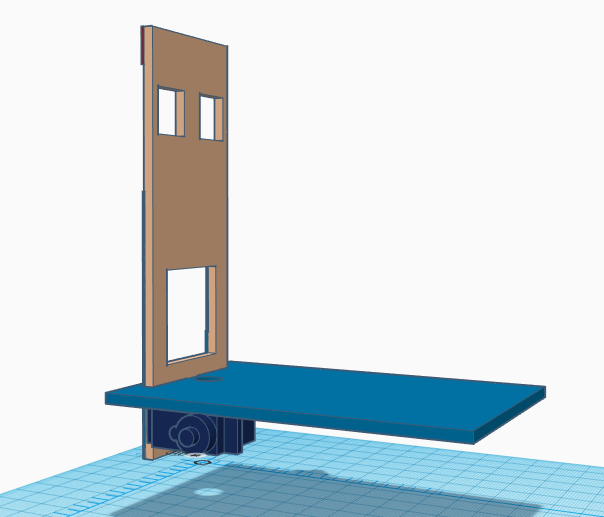
Glue the caster wheel to the base
Glue the TCRT5000 support just below at the feet and glue the TCRT5000 sensor to the support (glue it so the sensor is below the feet).

FS90R servo cables and TCRT5000 cables can be now pass through the base hole. After that, we can glue the LEDs matrix to the frontal face.
Connect the cables of the LEDs matrix to the top connector and glue to SG90 servos to the back of the frontal face and screw the horn to the servos (we should have previously check that the servos are at the minimum possible angle, so that the mechanical limit is indeed the position of the horn shown).
Glue the Powerbank, Arduino Shield+Arduino Nano, buzzer and Bluetooth to the robot’s base and connect the corresponding cables.

Glue the arms to the servo horns and glue the sword and pick to the hands.

Finally, glue the ultrasound sensor to the corresponding hole in the frontal face so that connectors pins are pointing up.
