[:es]En esta entrada se presentará un ejemplo de un robot DYOR con diversas opciones de funcionamiento.
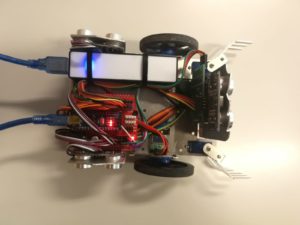
Diseño del Robot.
En nuestro caso decidimos hacer tres funcionamientos diferentes, estos modos serán elegidos desde la aplicación que posteriormente comentaremos.

En primer lugar decidimos realizar un modo de funcionamiento en el que el robot se moviese de forma automática tratando de evitar los obstáculos que se encuentren en sus alrededores. Para ello hemos dotado a nuestro robot con 3 sensores de ultrasonidos, dispuestos uno en cada lateral y otro en la parte delantera, de esta forma podemos elegir el lado de giro según lo que convenga.

Por otra parte hemos creado un modo en el que controlamos el robot de forma manual, mediante botones o mediante la utilización de un giroscopio en el que al mover el móvil cambia la dirección del coche.
Por último se ha creado un modelo seguilineas gracias a un sensor de infrarrojos, este sensor detecta en escala de grises, de forma que en función de lo negro que detecta aplica una ganancia a las ruedas guiando al robot por la línea.

Por otra parte de forma decorativa le hemos añadido una matriz de leds con la que podemos representar la boca del robot, o escribir alguna palabra, un zumbador con el que señalizamos la marcha atrás y con el que podemos hacer sonar parte de melodías famosas como la de Juego de Tronos o Piratas del caribe y por ultimo le hemos añadido dos brazos a forma de pinza de forma que podemos atrapar ciertos objetos y arrastrarlos.

Programación
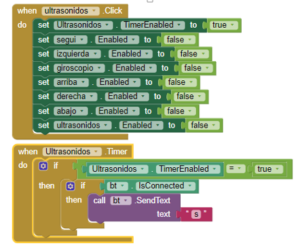
Como hemos comentado antes, para el control del robot se ha creado una app, dicha aplicación se ha creado con Appinventor la cual es una aplicación web basada en la programación por bloques. Con dicha aplicación realizamos una conexión por bluetooth con el robot, para ello enviamos letras desde el teléfono móvil las cuales son recibidas por el arduino.
A continuación representamos un trozo del código de bloques correspondido a la inicialización del modo seguilineas, se puede apreciar que en primer lugar al hacer click se inhabilitan los modos restantes y se habilita el timmer relacionado con el modo seleccionado.
En el siguiente bloque se aprecia como el bluetooth constantemente envía la señal al arduino, esto sucederá hasta que se sale del modo pulsando el stop. Para los demás modos realizamos unos bloques muy similares
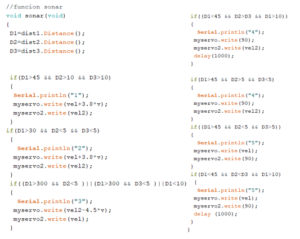
Por último en la programación en Arduino nos hemos basado en códigos obtenidos de internet y creados con la aplicación de Facilino, que al igual que Appinventor funciona mediante bloques, pero posteriormente dichos códigos los hemos modificado manualmente en el entorno de Arduino, para que se adaptasen a nuestras especificaciones. Por otra parte, algunos trozos del código los hemos realizado todos de forma manual como el modelo que funciona con ultrasonidos.
A continuación representaremos el código utilizado en el modelo de ultrasonidos, este modelo es sobre todo para distancias medias como se puede apreciar en el código.
En conclusión, con este robot hemos presentado un móvil muy versátil y fácil de, manejar, gracias a su app, desde la que podemos controlar todos los aspectos de nuestro robot.
Vídeos
[:]