[:es]En esta entrada os presentamos un nuevo diseño del robot DYOR para la asignatura Robótica Móvil en la UPV (ETSID).
Robot Guarda controlado por Arduino Nano que realiza patrulla
Diseño y funcionamiento
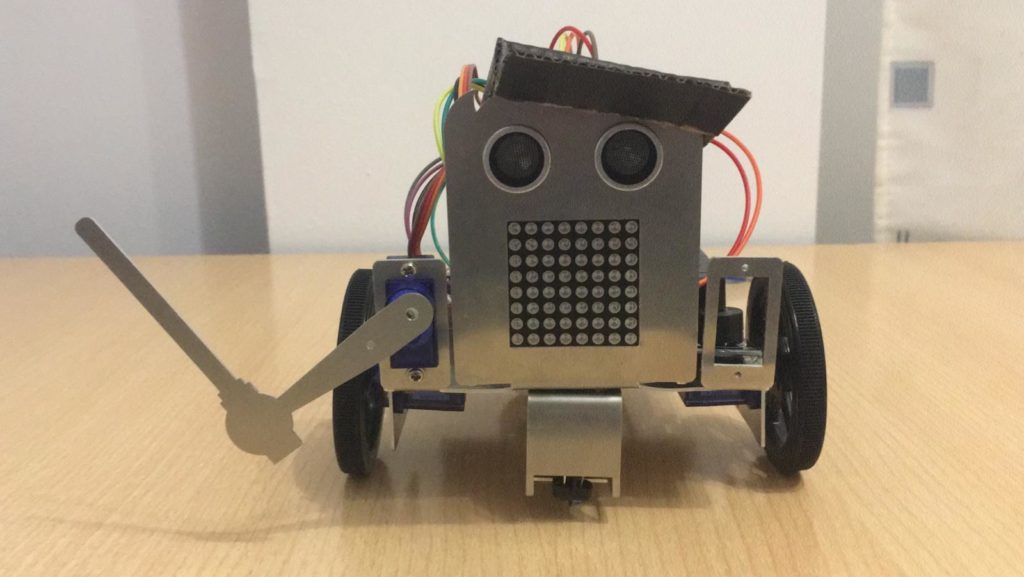
Para este robot el diseño que se ha seguido ha sido el de emular el comportamiento de un guarda de seguridad haciendo patrulla por un camino fijo. El componente que nos permite hacer que el robot siga esta ruta es el sensor de infrarrojos, situado debajo del cuerpo del robot y muy próximo al suelo, si éste detecta blanco significa que el robot ha abandonado su ruta y deberá corregir su posición con ayuda de los FS90R para volver a la ruta (y detectará negro el sensor de nuevo). Además, se ha equipado al robot con un brazo/espada y un sensor de ultrasonidos. Al detectar el sensor de ultrasonidos un obstáculo (intruso), se ha programado al robot para que se detenga y luche moviendo el brazo con un servo SG90 emulando el golpeo que podría hacer un guarda corriente hasta que el obstáculo desaparezca. Se ha programado el robot para que emita sonidos mediante el zumbador emulando el estar en combate utilizando melodía tensa y hacer patrulla con normalidad utilizando una melodía tranquila. A la par que el zumbador, el robot cuenta con una matriz de LEDs 8×8 con la que mostrará si se encuentra en combate o realiza su ronda tranquilamente.
Componentes electrónicos
- 1 Arduino Nano
- 1 Ultrasonidos
- 2 FS90R
- 1 Powerbank
- 1 Buzzer
- 1 SG90
- 1 Placa expansión Arduino Nano
- 1 Sensor infrarrojo
- Cables para realizar conexiones necesarias
- Accesorios visuales a gusto
Más abajo encontrarás un enlace para descargar el código empleado.
Fotos
Vídeos demostración
Descarga código
Autor
Joaquín Talavera
[:]