[:es]En la siguiente publicación voy a pesentar el robot Wall·E creado para la optativa de Robótica Móvil del Master en Ingeniería Industrial.
Diseño
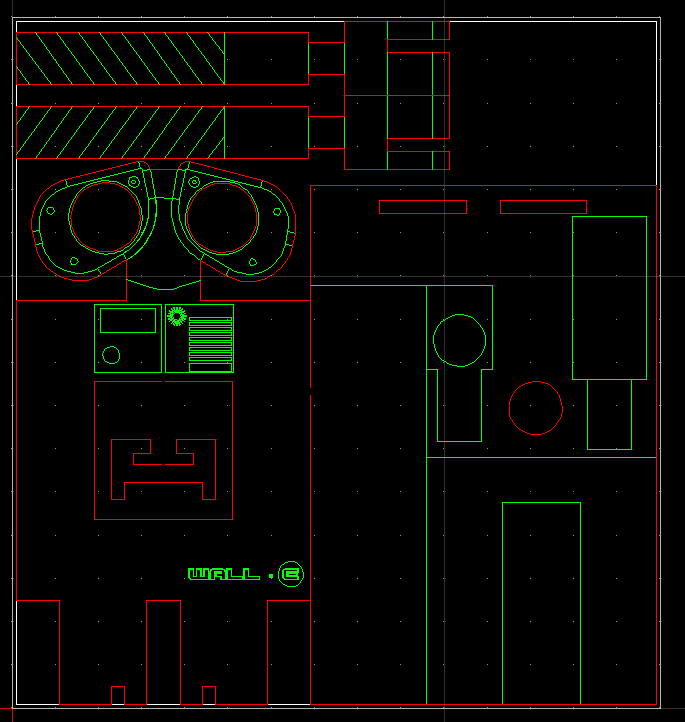
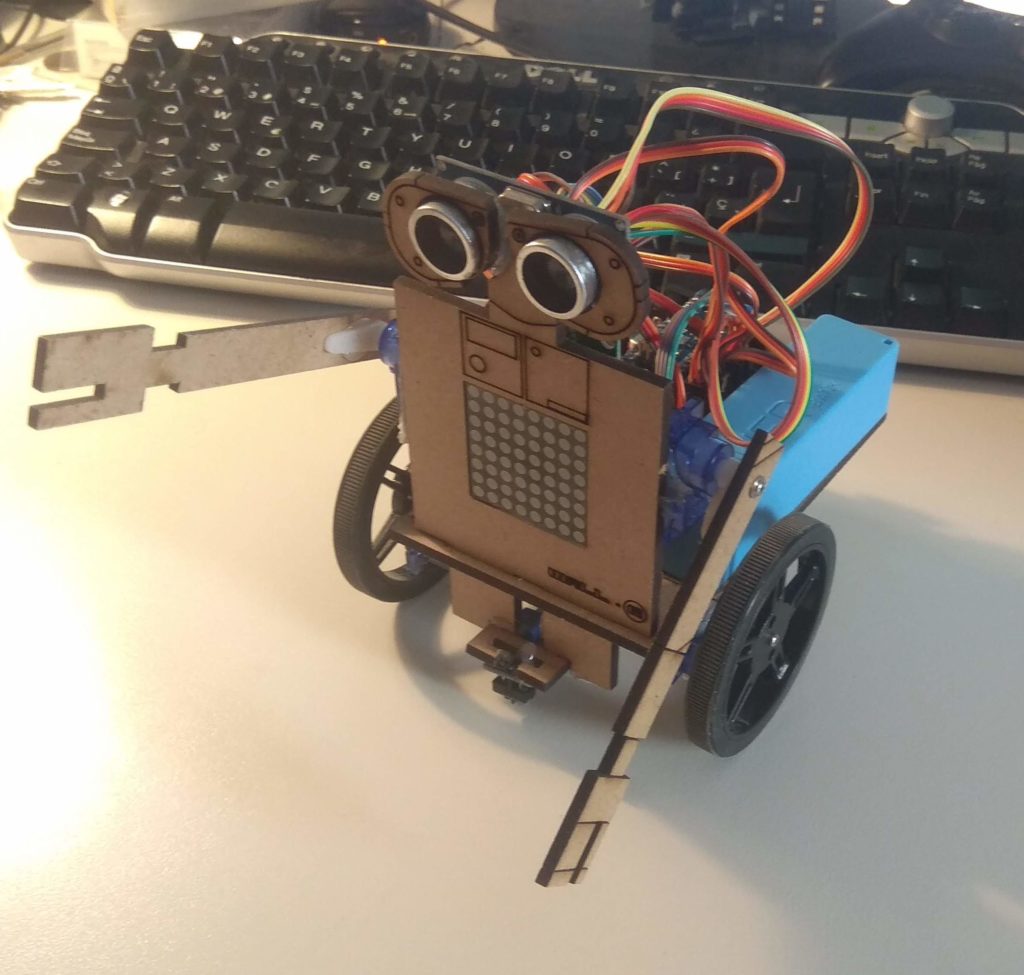
El robot usa como base el diseño basico de robot DYOR, al cual se le diseñado un frontal a imagen del robot de la película Wall·E, y un par de brazos más grandes para poder realizar tareas de recogida de basuras.
Componentes
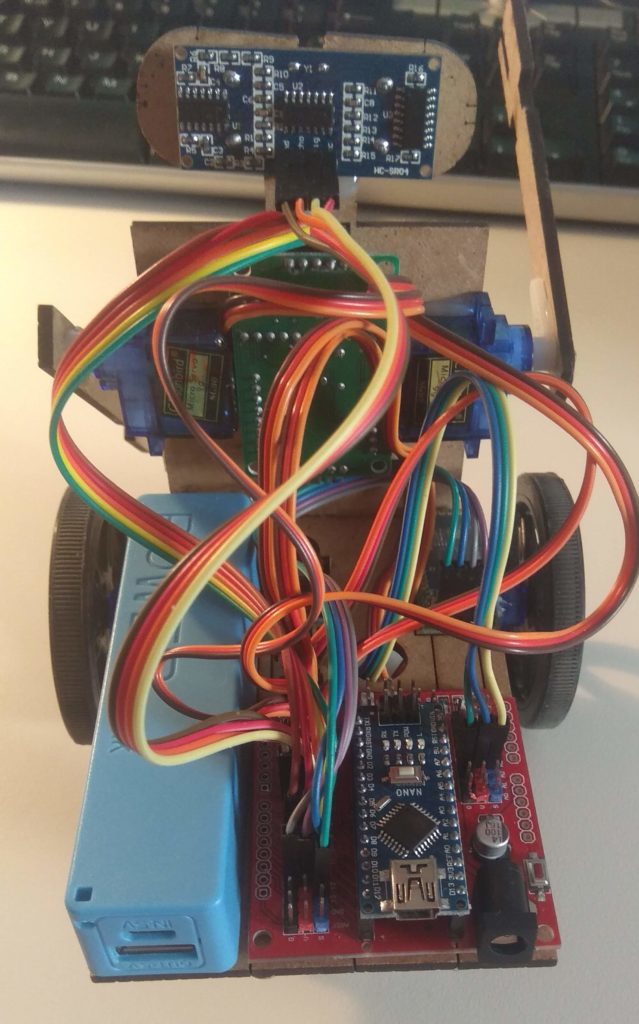
Los componentes utilizados son los proporcionados en el pack «DYOR Fabricación Propia«, que son los siguientes:
- Arduino Nano + Exension Shield Arduino Nano I/O
- Powerbank 3600mAh
- Ultrasonido HC-SR04
- Zumbador de sonido KY-006
- 2 x Servos SG90 (brazos)
- 2 x Servos FS90R (ruedas)
- SPP-C Bluetooth (compatible HC-06)
- Seguilíneas TCRT5000
- Rueda loca
- Matriz de LEDs
Funciones y Programas
Al robot se le han programado tres modos de funcionamiento distintos: control remoto por bluetooth, seguilíneas y retira escombros.
La programación se ha llevado a cabo mediante Facilino y el entorno de programación de Arduino.
Control Remoto por Bluetooth
Para el control remoto por bluetooth se ha diseñado una aplicación para dispositivos android mediante la utilidad AppInventor 2 desarrollada por el MIT.
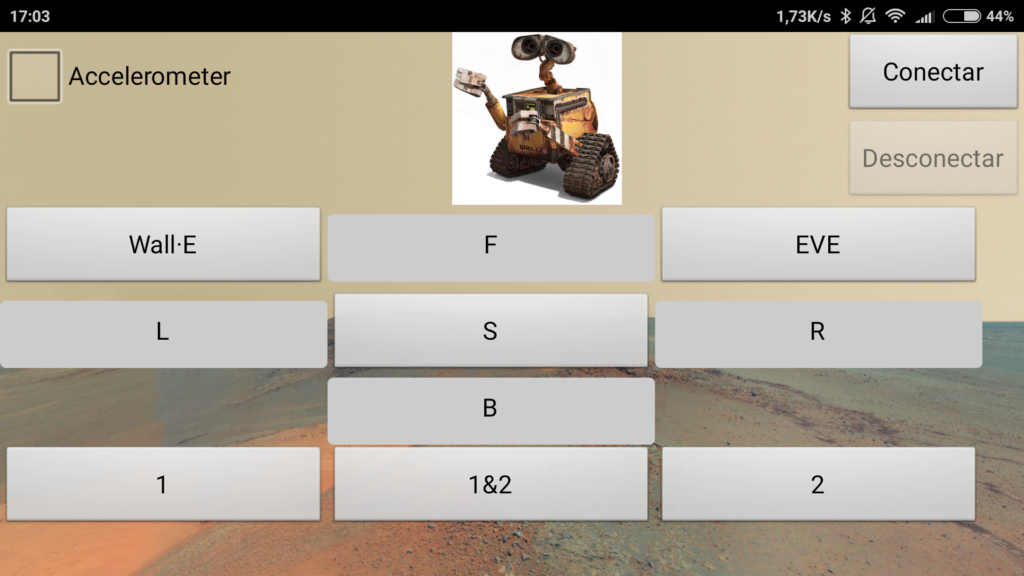
En la aplicación se puede controlar el movimiento del robot pulsando los diferentes botones, además de levantar los brazos, ya sea individualmente mediante los botones 1 y 2, o simultaneamente mediante el botón central.
Si marcamos la casilla «Accelerometer» accedemos al control del robot mediante el acelerómetro del smartphone, haciendo desaparecer los botones y mostrando los valores registrados por el acelerometro y la suma de estos valores.

Seguilineas
Para el modo de seguilineas se ha utilizado el sensor de infrarrojos TCRT5000, mediante el cual podemos medir la cantidad de luz reflejada, por lo que mediante un control proporcional haremos que el robot vaya girando en busca del borde entre el color negro y el blanco.
Retira Escombros
La misión del robot Wall·E es recoger toda la basura en la tierra a la espera de la vuelta de los seres humanos al planeta. Para implementar este programa se ha utilizado el sensor de ultrasonidos HC-SR04 para medir la distancia a los objetos del entorno. Cuando un objeto se encuentra dentro del alcance del robot, este bajará los brazos para sujetarlo y dará un sonido de enfado, procediendo a retirarlo de su camino. Una vez retirado el robot dará un sonido de alegría y seguirá buscando nuevos objetos que retirar de su camino.
Vídeos y Fotos
Control por Bluetooth
Seguilineas:
Autor
Pau Garrigues[:]