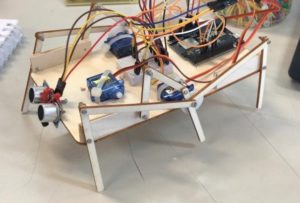
[:es]En esta entrada vamos a explicar como se ha desarrollado el robot «Spider-Bot».
Lista de materiales
– Placa desarrollo ESP32 Wemos/Espduino
– Sensor de ultrasonidos HC-SR04
– Módulo sigue líneas TCRT500
– Batería para la alimentación de 5 V
– 2 servos con movilidad 360º FS90R
– 1 servo con movilidad 360º SG90
– Madera para el corte láser
Además para poder completar el montaje del robot fueron necesarios tornillos y tuercas, una pistola de silicona y bridas, como aclaración, se utilizaron bridas para poder quitar con facilidad los servos en caso de que alguno se rompiera.
Montaje
Para montar el robot es necesario en primer lugar utilizar un programa como el AutoCad, para generar las piezas que se envían al corte láser.
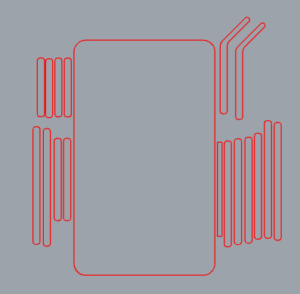
Como mejora para próximos robots, es recomendable hacer las patas más anchas, porque como se comentará más adelante, la superficie de apoyo resultó ser insuficiente, por lo que se podría corregir, y como consejo, añadirle una gota de silicona para asegurar un mejor movimiento del robot y evitar que resbalen las patas.
El siguiente paso, es realizar los agujeros, en este caso se utilizó un taladro de mesa para mayor precisión, pero no es imprescindible, también es recomendable medir bien la tornillería de la que se dispone, para evitar taladras varias veces en el mismo punto.

En la imagen se puede observar que se han utilizado dos tuercas, esto es debido a que la rotación de las patas afloja la tuerca y termina desmontándose, para esto hay varias soluciones, la primera de ellas sería utilizar tuercas con sistema de bloqueo, pero son más caras y se optó por este sistema. Otra opción sería no utilizar tornillos, y utilizar un eje y fijarlo en los laterales.
Una vez montado todo, ya se podría subir el programa y hacerlo funcionar.
Se recomienda probar cada componente por separado antes de montar, y revisar bien el mecanismo de las patas, para que no se enganche y rompa algún servo.
Programación
En este robot se platearon varias funcionalidades, que como en la mayoría de robots se programaron en arduino y para la aplicación del móvil se utilizó el app inventor. Toda la programación se tuvo que ajustar basándose en el comportamiento del robot, primero de todo, es importante que al usar una ESP32 la alimentación sea la adecuada para evitar problemas con los reseteos de la misma, también es muy importante no utilizar los pines no compatibles con el bluetooth, en caso de hacerlo con arduino, todo esto no es necesario, pero podrían surgir problemas por memoria insuficiente y hay que poner el módulo de bluetooth a parte.
Los modos que se han implementado son un modo evita obstáculos, un modo sigue mano y el control remoto mediante un mando en el móvil. Se descartó el modo sigue líneas debido a que con un solo sensor y el movimiento irregular del robot era muy difícil que siguiera la línea, por ello se optó por el modo sigue mano, pero en caso de querer hacer un sigue líneas se recomienda usar mínimo tres sensores.
- Evita obstáculos:
En este modo de funcionamiento el robot va en línea recta hasta que detecta un obstáculo con el ultrasonidos, en ese caso, el robot va hacia atrás y hacia la derecha hasta que esquiva completamente el objeto, mientras tanto también mueve las patas de ataque simulando una araña que se defiende un depredador.
- Sigue mano:
Este modo consiste en que el robot va en línea recta siempre que detecte la mano delante suyo, utilizando el sensor de ultrasonidos y el de luz, para evitar que se confunda con un obstáculo. Cuando no detecta la mano, gira sobre si mismo, de esta forma el usuario puede escoger la dirección, esperando a que gire.
- Control remoto:
A través de un mando en la aplicación del móvil se puede dirigir al robot, también dispone de un botón para mover las garras.
A través de la aplicación pueden seleccionarse todos los modos, junto a una función de paro que deja al robot en un estado de reposo.

Conclusiones
Realizar un proyecto de este tipo requiere de mucho tiempo y una buena planificación, es importante saber las limitaciones de los componentes y de los recursos de cada uno para poder plantear un proyecto realista, pero una vez se ven los resultados se puede aprender mucho del proceso, y sobre todo ver mejoras y cambios para futuros proyectos.
El «Spider-Bot» resultó tener más complicaciones de lo esperado y hubo muchos cambios durante el proceso, sin embargo, el resultado fue satisfactorio y cumplió con lo esperado.
Ángel Hernaiz Martorell
15/06/2023
[:]