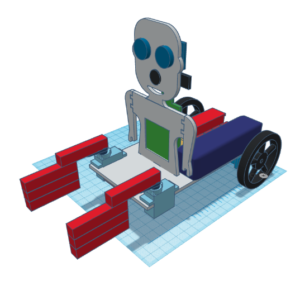
Among these models, we can find the original DYOR design, a robot with two wheels controlled with continuous rotation servos and a gripper, based on LEGO parts, that can be individually controlled with two servo motors. In addition to this, it also includes a LEDs matrix to generate expressions, a buzzer, an ultrasound sensor, a TCRT5000 linetracker module and a bluetooth module. The robot can be controlled and powered via an Arduino Nano v3.0 board, together with an I/O expansion board and a powerbank.
Originally, the DYOR robot was created to avoid soldering, although there might be some variations which might be cheaper, but require soldering o can be controlled with ESP32 processor, as a replacement of Arduino Nano v3.0, with WiFi/Bluetooth capabilities.
Which models can I find?
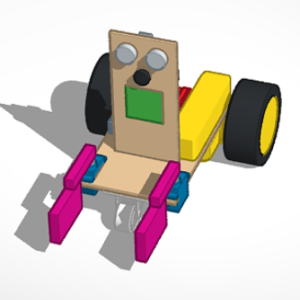
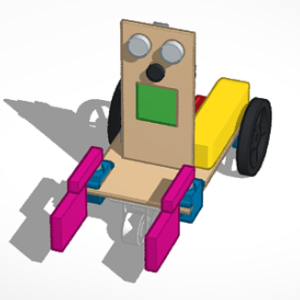
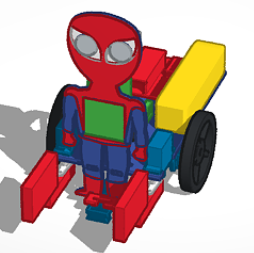
Within this configuration we can find DYOR robots such as DYOR Standard, DYOR SpiderBot, DYOR FootBot, etc… All of them have common elements. Compared to other models, they are easy to assemble and simple, with the main goal of providing basic instructions to that everyone can reproduce them.
Variants based on DIY robots, use Smart Car motors (yellow), while the original DYOR (without DIY) uses the FS90R servo instead.
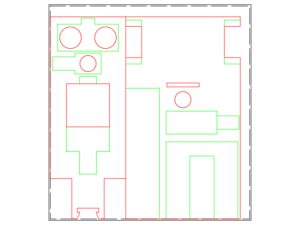
How can I make it?
The robot can be made with laser cutting, 3D printing, moulds or obviously any other manual procedure.
Related entries:

Assembly of DYOR DIY SpiderBot
Assembly of DYOR DIY Standard
Assembly of DYOR Standard
Assembly of DYOR SpiderBot
Assembly of DYOR FootBot
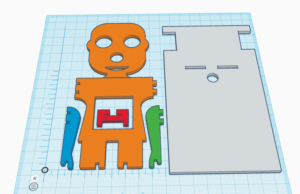
Customization of DYOR FootBot with TinkerCAD
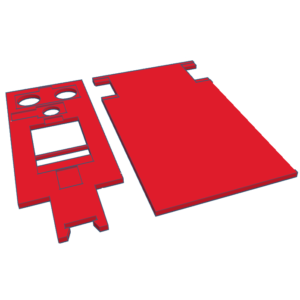
TinkerCAD Design of DYOR robot