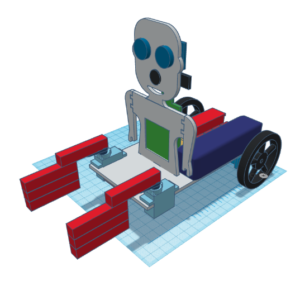
Estos modelos incluyen el diseño original del robot DYOR, un robot con dos ruedas traseras controladas por unos servos de rotación continua y unas pinzas basadas en piezas de LEGO controladas de forma individual por dos servo motores. Además, incluye una matriz de LEDs para generar expresiones, un zumbador de sonido, un sensor de ultrasonidos, un módulo de seguimiendo de líneas TCRT5000 y un módulo bluetooth. El robot se controla con Arduino Nano v3.0, que junto con una placa de expansión y un pequeño powerbank permiten controlar y alimentar a toda la electrónica.
Originalmente, el robot DYOR fue concebido para no requerir ningún tipo de soldadura, si bien se pueden encontrar variaciones que permiten utilizar componentes más asequibles pero requieren soldadura o comunicación WiFi/Bluetooth mediante el reemplazo del Arduino Nano v3.0 con un procesador ESP32.
¿Qué modelos puedo utilizar?
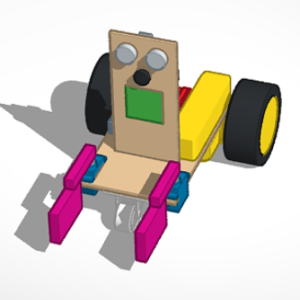
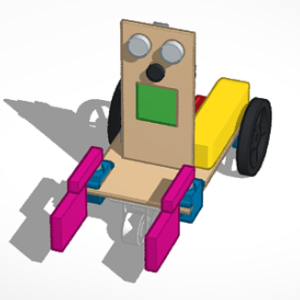
Dentro de este modelo, podemos encontrar los robots DYOR Standard, DYOR SpiderBot, DYOR FootBot, etc… Todos ellos disponen de elementos comunes en su configuración. En comparación con otros modelos son constructivamente sencillos y simples, con la intención de que cualquier pueda seguir las instrucciones y llegar al mismo resultado.
Las variantes DIY utilizan los motores Smart Car (amarillos), mientras que los DYOR originales (sin DIY) utilizan por contra los servos FS90R.
¿Cómo puedo fabricarlo?
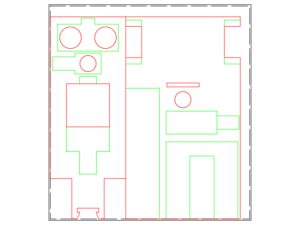
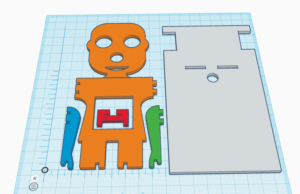
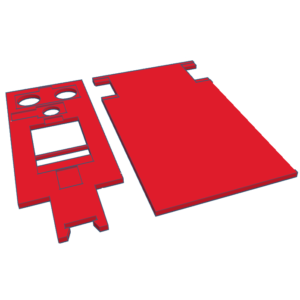
El robot puede fabricarse mediante corte por láser, imprimirse en 3D, mediante moldes o por supuesto, de forma manual.
Entradas relacionadas:

Ensamblaje DYOR DIY SpiderBot
Ensamblaje DYOR DIY Standard
Ensamblaje DYOR Standard
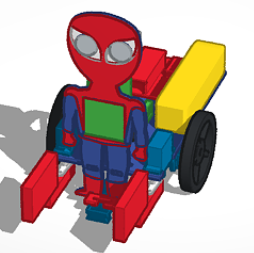
Ensamblaje DYOR SpiderBot
Ensamblaje DYOR FootBot
Personalización de DYOR FootBot con TinkerCAD
Diseño TinkerCAD del robot DYOR