[:es]Estos modelos incluyen el diseño original del robot DYOR, un robot con dos ruedas traseras controladas por unos servos de rotación continua y unas pinzas basadas en piezas de LEGO controladas de forma individual por dos servo motores. Además, incluye una matriz de LEDs para generar expresiones, un zumbador de sonido, un sensor de ultrasonidos, un módulo de seguimiendo de líneas TCRT5000 y un módulo bluetooth. El robot se controla con Arduino Nano v3.0, que junto con una placa de expansión y un pequeño powerbank permiten controlar y alimentar a toda la electrónica.
Originalmente, el robot DYOR fue concebido para no requerir ningún tipo de soldadura, si bien se pueden encontrar variaciones que permiten utilizar componentes más asequibles pero requieren soldadura o comunicación WiFi/Bluetooth mediante el reemplazo del Arduino Nano v3.0 con un procesador ESP32.
¿Qué modelos puedo utilizar?
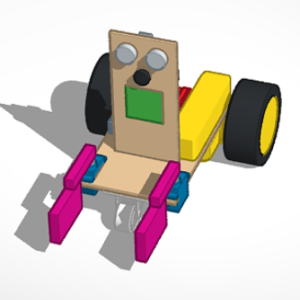
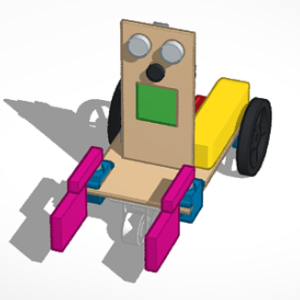
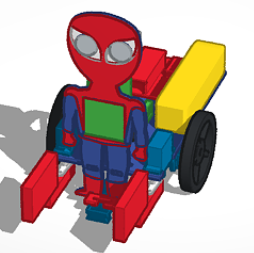
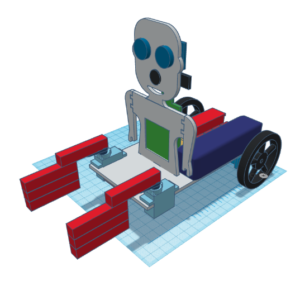
Dentro de este modelo, podemos encontrar los robots DYOR Standard, DYOR SpiderBot, DYOR FootBot, etc… Todos ellos disponen de elementos comunes en su configuración. En comparación con otros modelos son constructivamente sencillos y simples, con la intención de que cualquier pueda seguir las instrucciones y llegar al mismo resultado.
Las variantes DIY utilizan los motores Smart Car (amarillos), mientras que los DYOR originales (sin DIY) utilizan por contra los servos FS90R.
¿Cómo puedo fabricarlo?
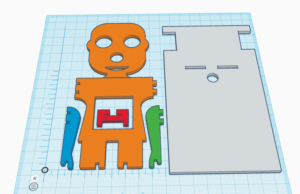
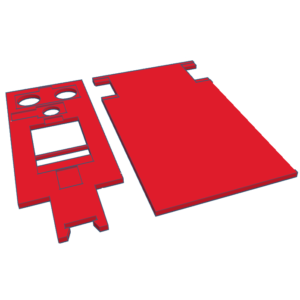
El robot puede fabricarse mediante corte por láser, imprimirse en 3D, mediante moldes o por supuesto, de forma manual.
Entradas relacionadas:

[:es]Ensamblaje DYOR DIY SpiderBot[:en]Assembly of DYOR DIY SpiderBot[:]
[:es]Ensamblaje DYOR DIY Standard[:en]Assembly of DYOR DIY Standard[:]
[:es]Ensamblaje DYOR Standard[:en]Assembly of DYOR Standard[:]
[:es]Ensamblaje DYOR SpiderBot[:en]Assembly of DYOR SpiderBot[:]
[:es]Ensamblaje DYOR FootBot[:en]Assembly of DYOR FootBot[:]
[:es]Personalización de DYOR FootBot con TinkerCAD[:en]Customization of DYOR FootBot with TinkerCAD[:]
[:es]Diseño TinkerCAD del robot DYOR[:en]TinkerCAD Design of DYOR robot[:]
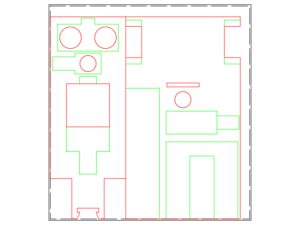
[:es]Diseño QCAD 2D del robot DYOR[:en]2D QCAD Design of DYOR robot[:]
Originally, the DYOR robot was created to avoid soldering, although there might be some variations which might be cheaper, but require soldering o can be controlled with ESP32 processor, as a replacement of Arduino Nano v3.0, with WiFi/Bluetooth capabilities.
Which models can I find?
Within this configuration we can find DYOR robots such as DYOR Standard, DYOR SpiderBot, DYOR FootBot, etc… All of them have common elements. Compared to other models, they are easy to assemble and simple, with the main goal of providing basic instructions to that everyone can reproduce them.
Variants based on DIY robots, use Smart Car motors (yellow), while the original DYOR (without DIY) uses the FS90R servo instead.
How can I make it?
The robot can be made with laser cutting, 3D printing, moulds or obviously any other manual procedure.
Related entries:
[:es]Ensamblaje DYOR DIY SpiderBot[:en]Assembly of DYOR DIY SpiderBot[:]
[:es]Ensamblaje DYOR DIY Standard[:en]Assembly of DYOR DIY Standard[:]
[:es]Ensamblaje DYOR Standard[:en]Assembly of DYOR Standard[:]
[:es]Ensamblaje DYOR SpiderBot[:en]Assembly of DYOR SpiderBot[:]
[:es]Ensamblaje DYOR FootBot[:en]Assembly of DYOR FootBot[:]
[:es]Personalización de DYOR FootBot con TinkerCAD[:en]Customization of DYOR FootBot with TinkerCAD[:]
[:es]Diseño TinkerCAD del robot DYOR[:en]TinkerCAD Design of DYOR robot[:]